


Bioinspired Flying Robots
Bioinspired Design Paradigm
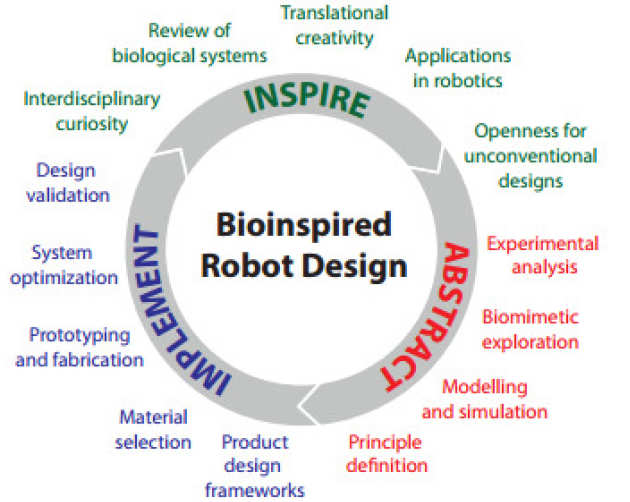
Biological inspiration is a key design approach for the development of innovative robots. Flapping wings, sensitised robotic skins, insect inspired compound eyes and artificial muscles are examples of nature acting as a source of inspiration for the design of novel artificial systems. The heart of successful bioinspired design is the abstraction of the underlying physical principles found in biology and their implementation in robotics using state of the art technology. In addition, developing bioinspired robots can help understand biological systems in more detail by being able to test different hypothesis about the physiology and behaviour of the living beings studied.
Butterfly-inspired Micro-gliders

An example of this approach is the development of flying micro-gliders inspired by butterfly wings. Certain species of butterflies use a combination of flapping and gliding in order to migrate long distances more efficiently. One of the most famous to do this is the Monarch butterfly (Danaus plexippus), pictured above. The wing shapes for the Monarch and other species have been studied for their aerodynamic properties. The butterflies have been found to be able to change the position of their wings to adapt their performance to different flight regimes. These studies are of great use in the design of robots which fly in similar regimes.
Lead Researchers
Alejandro Ortega Ancel
Robert Siddall
Raphael Zufferey
Talib Alhinai
Publications
-
Aerodynamic evaluation of wing shape and wing orientation in four butterfly species using numerical simulations and a low-speed wind tunnel, and its implications for the design of flying micro-robots
Alejandro Ortega, Rodney Eastwood, Daniel Vogt, Carter Ithier, Michael Smith, Robert Wood and Mirko Kovač
Royal Society Interface Focus, 2016. To appear. -
Launching the AquaMAV: bioinspired design for aerial–aquatic robotic platforms
Robert Siddall and Mirko Kovac
Bioinspiration and Biomimetics, vol. 9, no. 3, pp. 1-15, 2014.
-
The Bioinspiration Design Paradigm: A Perspective for Soft Robotics
Mirko Kovac
Soft Robotics, vol. 1, no. 1, pp. 28-37, 2013. -
Aerodynamic evaluation of four butterfly species for the design of flapping-gliding robotic insects
Mirko Kovac, Daniel Vogt, Danielle Ithier, Michael Smith, Rob Wood
IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), September 2012.
Funding
Engineering and Physical Sciences Research Council (EPSRC)