


Aerial Construction
Aerial Building Manufacturing

Aerial Building Manufacturing is a UK EPSRC funded research that will develop an aerial robotic construction system that enables aerial robots to 3D print building structures autonomously. Aerial Building Manufacturing (ABM) is already being trialled in many parts of the world and involves the use of large robots on a building site to 3D print (extrude) building materials to construct buildings. The research aims to miniaturise ABM and provide it with aerial capabilities so that it can be more mobile, and able to manufacture complex building structures while adapting to diverse site scenarios. This miniaturisation will also enable parallel production, where swarms of aerial printers working together could potentially reduce construction time and enable safer construction in hard-to access and dangerous conditions; often faced in construction work at-height and post-disaster reconstruction. For more information, please click here.
Automated Construction in Unstructured Environments with Aerial Robots
Aerial robots with the capability to autonomously construct structures would be invaluable in many applications: building temporary shelters following natural disasters such as earthquakes and floods, deploying scaffolding and support structures on conventional construction sites , or assembling ramps across gaps and difficult terrain to enable access to terrestrial vehicles. However, construction in unstructured environments would require aerial robots that adapt to terrains and layouts unique to individual physical sites. A framework for collective construction with multiple robots would be needed to enable collaborative robot-to-robot operations, dynamic task sharing, and collision avoidance. Construction materials would need to be lightweight to comply to the payload and battery life limitations of the aerial robots, but also versatile to conform to a wide ranging task requirements in target environments.
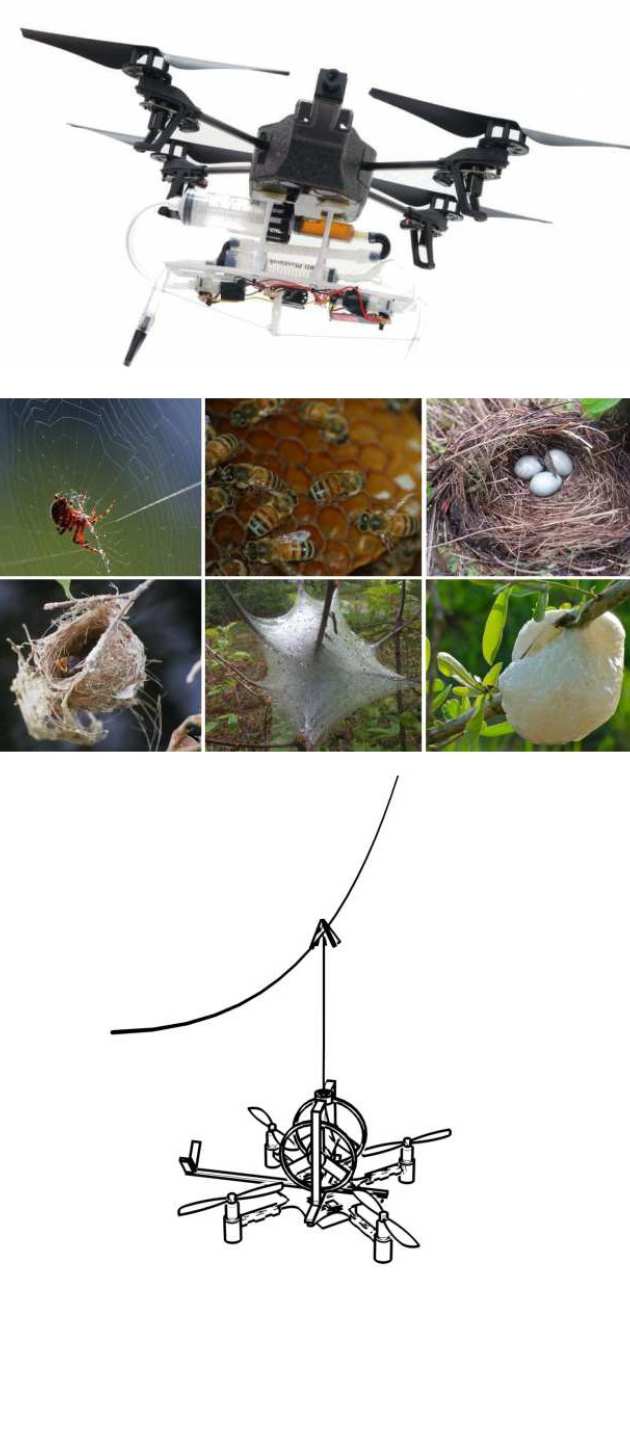
Our goal is to develop novel autonomous manufacturing methods by investigating techniques for building physical structures with aerial robots. This pursuit is multidisciplinary, combining unconventional building materials, behavioural construction algorithms and swarm control of aerial robot builders. The work is largely inspired by the way how animals, such as birds and bees, build structures using environmental material in combination with adhesives and intricate architectural designs. The current focus areas of the work include:
- Robot and mechanism designs for aerial construction Bespoke aerial robots, mechanisms, and hardware that are designed and optimised for construction tasks including deploying tensile elements and depositing amorphous materials.
- Algorithms for automated collective construction and assembly Framework for autonomous construction that utilises swarm intelligence, task allocation and sharing, reactive response to dynamic environment conditions such as
- Materials and structures design Development of lightweight materials with specifications and properties specific to aerial construction and deposition procedures for building freeform structures.
Construction

Tensile Construction
Collective construction of tensile support structures to enable perching for long-duration monitoring
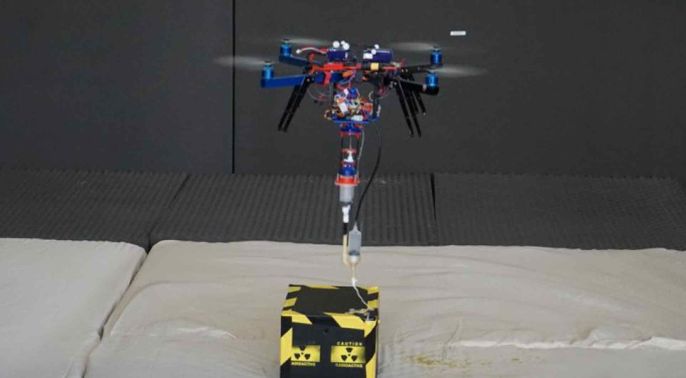
Aerial Additive Manufacturing
Additive manufacturing with an aerial robot using amorphous materials
Media
Tensile Web Construction and Perching with Nano Aerial Vehicles - May 2016

Lead Researchers
Talib Alhinai
Pisak Chermprayong
Maxime Bouyssou
Sina Sareh
Ketao Zhang
Publications
-
Learning from nature how to land aerial robots
Mirko Kovac
Science, May 2016. -
Tensile Web Construction and Perching with Nano Aerial Vehicles
Adam Braithwaite*, Talib Alhinai*, Maximilian Haas-Heger, Edward McFarlance, Mirko Kovac
Intl. Symposium on Robotics Research (ISRR), September 2015. -
3D Printing with Flying Robots
Graham Hunt, Faidon Mitzalis, Talib Alhinai, Paul Hooper, Mirko Kovac
IEEE Intl. Conference on Robotics and Automation (ICRA), June 2014.