


Research
Robotics

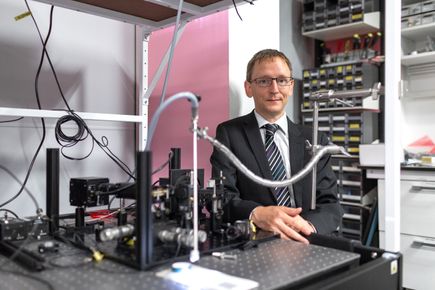
Soft Robotics & Applied Control – SRAC Lab
Dr Enrico Franco
Find out more

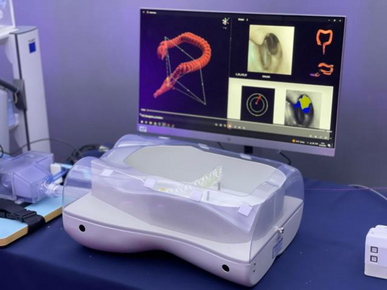
Imaging
.webp)

Surgical Data Science & AI
New post
Coming soon
Sensing
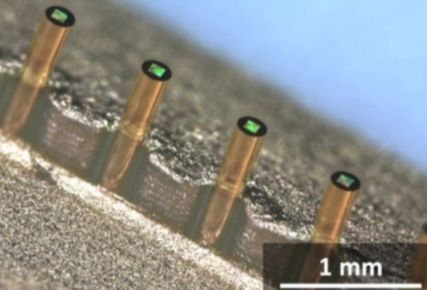

Augmented sensing
New role
Coming soon
Dr Enrico Franco
Find out more
New post
Coming soon
New role
Coming soon