The London Lower Limb Model
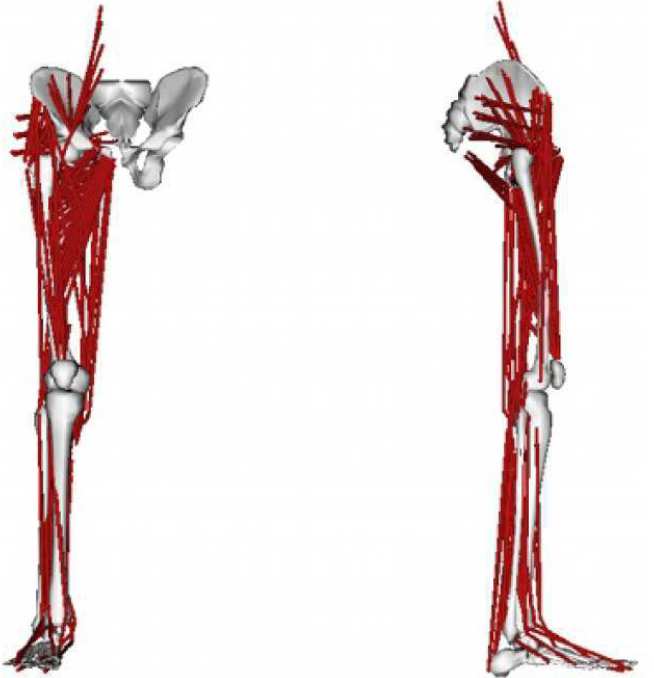
A musculoskeletal model of the lower limb has been developed in OpenSim (Delp et al., 2007) from the anatomical dataset published by Klein Horsman et al. with the purpose of estimating muscle and joint contact forces during daily living activities. The unilateral model is composed of six bodies (pelvis, femur, patella, tibia, hind foot, mid foot plus phalanxes) connected by a spherical joint (hip), and 4 hinges patello-femoral joint, tibio-femoral joint, talocrural joint and subtalar joint). Accounting for the 6 degrees of freedom of the pelvis with respect to the ground and for the kinematic constraint used to define the patellar movement, the model has twelve degrees of freedom. A total number of 38 muscles are represented by 163 actuators. Viapoints and wrapping surfaces were introduced to improve the path of some muscles. Minor modifications were applied to the original database in order to achieve ankle joint functionality.
Publications
Further details of the work are given in:
- Modenese, L., Gopalakrishnan, A., Phillips, A.T.M., Application of a falsification strategy to a musculoskeletal model of the lower limb and accuracy of the predicted hip contact force vector, Journal of Biomechanics, 46(6):1193-1200, 2013
- Modenese, L., Phillips, A.T.M., Prediction of hip contact forces and muscle activations during walking at different speeds, Multibody System Dynamics, 28(1-2):157-168, 2012
- Modenese, L., Phillips, A.T.M., Bull, A.M.J., An Open Source Lower Limb Model: Hip Joint Validation, Journal of Biomechanics, 44(12):2185-2193, 2011
Downloads
The following files related to this project are available for download from the SimTK project page.
As further releases of the London Lower Limb Model are developed and published these will be made available using a Creative Commons license through the Structural Biomechanics and SimTK websites.
Researchers
Contact us
Dr Andrew Phillips
Imperial College London
Structural Biomechanics
Skempton Building
South Kensington Campus
London SW7 2AZ, UK
Creative Commons license
This work by Imperial College London, Structural Biomechanics is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.