


Shared-controllers for general multi-agent systems
 Shared-control refers to a control architecture in which there is a combination of a human operator input and a feedback control input. The human operator takes charge of the system in “normal” circumstance, while the feedback controller is active in case of emergencies, for example when the system evolves towards “dangerous” situations. Through the action of the shared-control, the safety of the overall closed-loop system is guaranteed and the aims of the operator are not changed. A key advantage of the proposed shared-control algorithm in comparison with other existing methods is that it allows the states of the system to reach the boundaries of the admissible state space safely.
Shared-control refers to a control architecture in which there is a combination of a human operator input and a feedback control input. The human operator takes charge of the system in “normal” circumstance, while the feedback controller is active in case of emergencies, for example when the system evolves towards “dangerous” situations. Through the action of the shared-control, the safety of the overall closed-loop system is guaranteed and the aims of the operator are not changed. A key advantage of the proposed shared-control algorithm in comparison with other existing methods is that it allows the states of the system to reach the boundaries of the admissible state space safely.
The project starts with the design of a shared-control scheme for a class of linear constrained systems with full state or partial state feedback. Then the algorithm is adapted to classes of nonlinear systems, such as a mobile robot, a rear-wheel drive car or a 3D UAV. Theoretical proofs of the feasibility of the shared-control law for different systems have been established. Simulations and experiments have been carried out to demonstrate the effectiveness of the algorithm. In addition, significant progresses have been made on the shared-control scheme for multi-agent systems, such as transportation systems, and simulation results have shown superior performance when compared with human action.
The design of a shared-control law contains two major steps. The first one is to design a feedback controller satisfying all the requirements of the system. The next step is to develop a sharing scheme describing how the control authority is shared between the human operator and the feedback controller in various situations.
Current work focuses on:
- The theoretical proof of the shared-control scheme for general nonlinear systems.
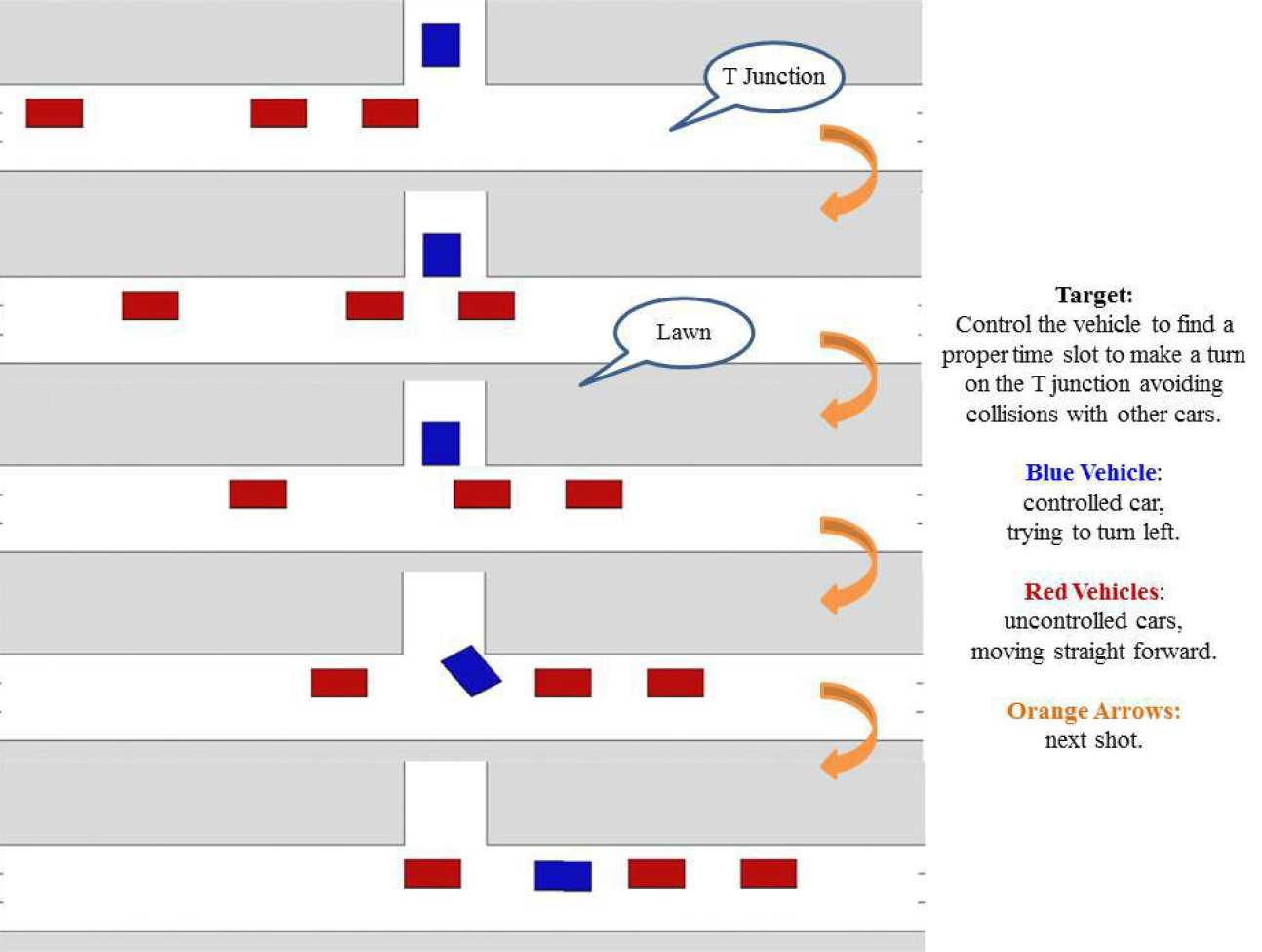
- The design of shared-controllers for general multi-agent systems.
- The design of shared-controllers with limited information for a multi-agent systems.
CAP People
- Prof Alessandro Astolfi, a.astolfi@imperial.ac.uk
- Miss Jingjing Jiang, jingjing.jiang10@imperial.ac.uk
Intelligent Systems and Networks
- Dr Yiannis Demiris, y.demiris@imperial.ac.uk
External
- Mr Pierluigi Di Franco, Pierluigi.difranco@students.uniroma2.eu
Shared-Control of a Robotic Wheelchair
