
HARMS Lab: Human-centred Automation, Robotics and Monitoring for Surgery
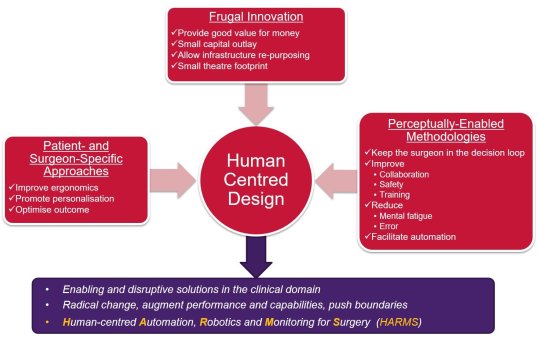
The HARMS lab (www.harms-lab.org) employs Patient- and Surgeon-specific approaches, Perceptually-Enabled Methodologies and Frugal Innovation through Human-Centred Design to deliver enabling and disruptive solutions in the areas of Monitoring, Automation and Robotics for Surgery. Our Human-Centred paradigm starts with the people we are designing for and ends with new solutions that are tailored to suit their needs. The people we are designing for are primarily the Patient and the Surgeon, but of equal importance are the Health Provider, the Tax Payer and the Nurse.
Our Human-Centred paradigm is based on the following first principles:
- Patient- and surgeon-specific methodologies with the aim to minimize and eventually eliminate invasiveness, optimise outcome, improve ergonomics and promote personalisation.
- Frugal innovation to provide affordable robotic surgery capabilities, allow infrastructure re-purposing and negligible theatre footprint.
- Perceptually-enabled functionalities to improve ergonomics, reduce mental fatigue, facilitate automation and increase safety in the operating theatre.
We aim to:
- Develop enabling technologies that introduce radical change, augment performance and capabilities by making robotic surgery attainable and accessible.
- Introduce disruptive innovation that pushes the boundaries by proposing new paradigms in minimally invasive surgery.
- Deliver solutions that are open to adoption and adaptation to a wide range of applications, in and out of clinical settings.
 A significant part of the HARMS Lab work stems from the desire to disrupt the oligarchical status quo of the robotic surgery market, democratise and accelerate robotic surgery adoption. This will be achieved by giving smaller hospitals and poorer health systems the opportunity to adopt robotic technology or even develop it and customize it in-house.
A significant part of the HARMS Lab work stems from the desire to disrupt the oligarchical status quo of the robotic surgery market, democratise and accelerate robotic surgery adoption. This will be achieved by giving smaller hospitals and poorer health systems the opportunity to adopt robotic technology or even develop it and customize it in-house.
 A significant part of the HARMS Lab work stems from the desire to disrupt the oligarchical status quo of the robotic surgery market, democratise and accelerate robotic surgery adoption. This will be achieved by giving smaller hospitals and poorer health systems the opportunity to adopt robotic technology or even develop it and customize it in-house.
A significant part of the HARMS Lab work stems from the desire to disrupt the oligarchical status quo of the robotic surgery market, democratise and accelerate robotic surgery adoption. This will be achieved by giving smaller hospitals and poorer health systems the opportunity to adopt robotic technology or even develop it and customize it in-house.Research Topics

Research topics include the development of robotic platforms for a wide range of procedures for non-invasive diagnosis and ultra-minimally invasive therapy. Procedures include but are not limited to:
- Single Incision and Natural Orifice Laparoscopic Surgery,
- Endoscopic Microsurgery (including Neurosurgery),
- Natural Orifice Gastrointestinal approaches,
- Wide-area automated Optical Biopsy.
Perceptually-enabled methodologies such as gaze-tracking, haptics, multi-sensor fusion, artificial intelligence and robotic assistance in the operating theatre are being investigated for improving training, collaboration and safety.
Modern manufacturing modalities and principles, such as 3D printing and soft robotics, are also central to the HARMS Lab investigations.
Extensive description of past and ongoing research can be found on the lab webpage: www.harms-lab.org

Research Student Supervision
Ahmad,A, Soft controllable rectum phantom design with integrated tumour lesions
Ansong Snr,YO, Soft Robotic-Based Colon simulating device for transplant
Ashraf,H, Eyetracking (TBC)
Avila-Rencoret,F, A Novel Endoscopic Scanning-Probe Device for Rapid Screening of Gastrointestinal Dysplasia
Avila-Rencoret,F, Concurrent Robotic Red-Flagging Framework for GI endoscopy
DeLorey,C, Sensing Soft Robot Actuation Using Electrical Impedance Tomography
Fathi,J, Safe Robotic Manipulators: A review of the potential applications and various approaches
Ferreira Caetano Marques,P, Modding da Vinci: A single-port robotic attachment for the da Vinci robot
Giannoudi,C, Gaze-Controlled Robotised Flexible Endoscope
Gonzalez Bueno,J, Hands-Free, Gaze Control of a Robotic Endoscope
He,L, Directly 3D printed soft robotics for minimally invasive surgery
Hu,Y, Control and haptic feedback of a robotically controlled ultrasound probe
Iribar Zabala,A, Soft Pneumatic Actuator based on double effect cylinder for Cardiovascular Surgery in Atrial Fibrillation scenario
Jiang,S, Self-Propelling Inchworm Robot for Colonoscopy Based on Pouch Motor
Kalantar,R, Gaze-Guided Assistive Robotic Suite for Patients with Motor Impairment
Kogkas,A, Towards a Perceptually Enabled, Smart Operating Theatre
Lyu,L, fMRI and MEG Compatible Hand Motion Sensor
Masvidal Andreu,J, Intra-corporeal Assembly of Soft Robotic Structures for Colonoscopic Procedures
Ming Zhao,, A cable-driven parallel medical robot for transoral laser surgery
Miyashita,K, A robotic attachment for force adaptive endomicroscopy
Motjer i Ayats,A, Development and testing of implantable sensors to assess the final quality of stent graft interventions
Pang,YW, Patient-specific optimisation of the CYCLOPS robotic system
Pittiglio,G, Stiffness Estimation and Control for Soft Robots in Minimally Invasive Surgery
Runciman,M, Patient-Specific and Atraumatic Soft Robotics for Ultra Minimally Invasive Diagnosis and Treatment
Samaratunga,R, Several applications of a Smart Operating Thetre
Shulakova,D, Soft Tactile Sensor using Electrical Impedance Tomography (EIT) for Tissue Palpation
Tajabadi,A, Development of a Deployable Laparoscopic Tool
Vrielink,J, 3D Printing for Patient- and Intervenrion-specific Single Access Surgical Instruments
Wang,H, Motion and force stabilization for patient movement during robotic remote presence ultrasound examination
Wang,MY, A personal gaze-guided robotic pod, for rehabilitation in unstructured environments
Zhang,L, 3D body reconstruction to enable a personalized guidance map for semi-automated ultrasound probe navigation
Zhao,M, Development of a simulation environment for a novel cable-driven parallel bimanual robot for single access surgery
Zhao,M, A cable-driven parallel medical robot for transoral laser surgery