MRI compatible robot
We developed MRI compatible robotic interfaces for neuroscience investigations first in callabration with Hannes Bleuler and Roger Gassert from EPFL, then in London for the study of brain activity in neonates.
Wrist flexion/extension interface

First fMRI compatible haptic interface, made in plastic with a hydraulic transmission to bring the power from the control to the scanner room.
[Gassert et al. (2006) IEEE/ASME Transactions on Mechatronics 11(2): 216-24]
Planar arm manipulation

A well designed fMRI compatible haptic interface providing quality force fields during arm movements despite a 10m long hydraulic transmission. However arm movements induce head motion thus artifacts in the image.
[Gassert et al. (2006), Proc IEEE Int Conf on Robotics and Automation (ICRA) 3825-31]
Cable Interface
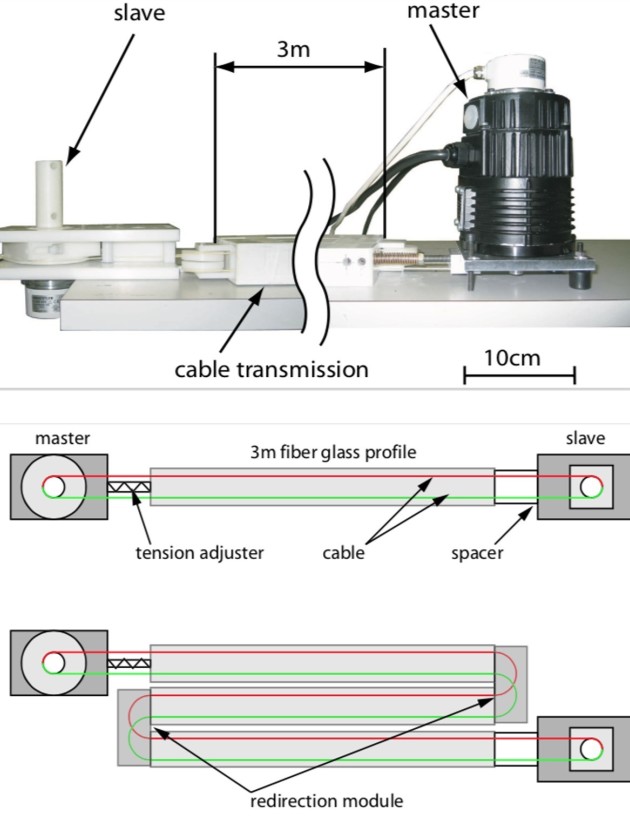
This cable transmission study revealed an excellence transmission through the cable (without the heavy infrastructure of the hydraulic transmission), but requires a rigid support.
[Chapuis et al. 2006, Proc IEEE/RAS-EMBS Int Conf on Biomedical Robotics and Biomechatronics (BioRob)]
Passive interface
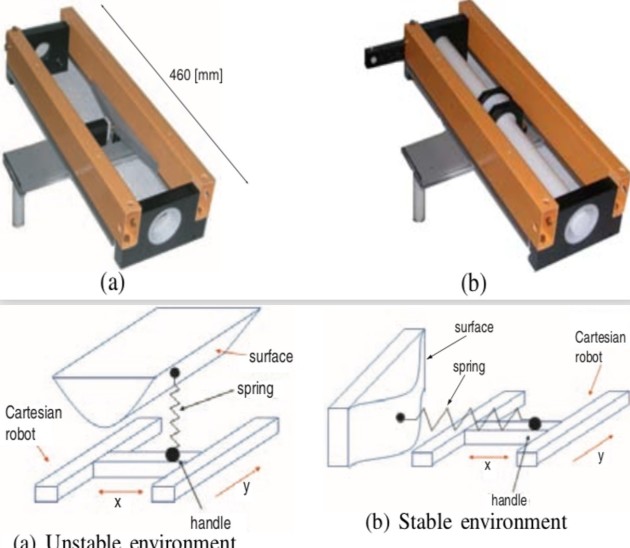
Interface without actuators using spring energy to yield various force fields.
[Dovat et al. (2005) Proc IEEE Engineering in Medicine and Biology Conf (EMBC) 5021-4]