Imperial Academics at the top robotics conferences in 2019
Robotics research drives improvements in our society. Top research from Imperial academics has international audiences.
Showcasing robotics research from Imperial College at the top robotics conference of 2019
Robotic solutions are improving our lives, contributing innovative solutions in our healthcare, providing interactive help in our homes and ensuring the safe and smart use of our infrastructure. Fundamental robotics research at Imperial College London is helping to drive this change, and 2019 has so far seen 25 papers from the labs that make up the Imperial Robotics Forum accepted into the top three robotics conferences of the year.
IEEE International Conference on Robotics and Automation (ICRA)
Aerial Inspection at close proximity of a vertical surface: a multi-modal mobility approach, H-N. Nguyen, B. Stephens, M. Kovac – Aerial Robotics Lab
A tether-powered automatic scanning system for repetitive monitoring. C. Liu, M. Kovac –Aerial Robotics Lab
 Gaze-based, Context-aware Robotic System for Assisted Reaching and Grasping, Ali Shafti, Pavel Orlov, A. Aldo Faisal – Brain and Behaviour Lab
Gaze-based, Context-aware Robotic System for Assisted Reaching and Grasping, Ali Shafti, Pavel Orlov, A. Aldo Faisal – Brain and Behaviour Lab
A Gaze-contingent Robotized Flexible Endoscope. A. Kogkas, B. Glover, N. Patel, A. Darzi, G. Mylonas - HARMS Lab
Gaze-contingent Robotic Assistance in the Operating Theatre. A. Kogkas, A. Ezzat, R. Thakkar, A. Darzi, G Mylonas - HARMS Lab
Deployable Soft Robotic Arm with Stiffness Modulation for Assistive Living Applications. J. Fathi, T. Vrielink, M. Runciman, G. Mylonas - HARMS Lab
Shape Sensing of Variable Stiffness Soft Robots using Electric al Impedance Tomography (Shortlisted for Best Medical Robotics Paper Prize). J. Avery, M. Runciman, A. Darzi, G. Mylonas - HARMS Lab
al Impedance Tomography (Shortlisted for Best Medical Robotics Paper Prize). J. Avery, M. Runciman, A. Darzi, G. Mylonas - HARMS Lab
Stiffness-Tuneable Limb Segment with Flexible Spine for Malleable Robots. Angus B. Clark and Nicolas Rojas – REDS Lab
MID-Fusion: Octree-based Object-Level Multi-Instance Dynamic SLAM, Binbin Xu, Wenbin Li, Dimos Tzoumanikas, Michael Bloesch, Andrew J Davison, Stefan Leutenegger – Smart Robotics Lab
DeepFusion: Real-Time Dense 3D Reconstruction for Monocular SLAM using Single-View Depth and Gradient Predictions, Tristan Laidlow, Jan Czarnowski, Stefan Leutenegger – Dyson Robotics Lab
KO-Fusion: Dense Visual SLAM with Tightly-Coupled Kinematic and Odometric Tracking, Charles F Houseago, Michael Bloesch, Stefan Leutenegger – Dyson Robotics Lab
 Soft Haptics for the Simulation of Physical Examinations: A Case Study for Sphincter Tone Rendering (Joint Second Best Paper of the Workshop Prize). R Haghighi Osgouei, L Maréchal, T Dhome-Casanova, C Kontovounisios, F Bello – SiMMS Lab
Soft Haptics for the Simulation of Physical Examinations: A Case Study for Sphincter Tone Rendering (Joint Second Best Paper of the Workshop Prize). R Haghighi Osgouei, L Maréchal, T Dhome-Casanova, C Kontovounisios, F Bello – SiMMS Lab
Characterizing Visual Localization and Mapping Datasets. Sajad Saeedi, E Carvalho, Wenbin Li, Dimos Tzoumanikas, Stefan Leutenegger, Paul HJ Kelly, Andrew J Davison – Robot Vision Group/Software Performance Optimisation Group
SLAMBench 3.0: Systematic Automated Reproducible Evaluation of SLAM Systems for Robot Vision Challenges and Scene Understanding. Mihai Bujanca, Paul-Adrian Gafton, Sajad Saeedi, Andrew Nisbet, Bruno Bodin, Michael F P O’Boyle, Andrew J Davison, Paul H J Kelly, Graham Riley, Barry Lennox, Mikel Luján, Steve Furber – Robot Vision Group/Software Performance Optimisation Group
A Mechanics-Based Model for 3-D Steering of Programmable Bevel-Tip Needles. Thomas Watts, Riccardo Secoli, Ferdinando Rodriguez y Baena – Mechatronics in Medicine Lab
Robotics: Science and Systems (RSS)
Reduced Order vs. Discretized Lumped System Models with Absolute and Relative States for Continuum Manipulators, Seyedmohammadhadi Sadati, Ali Shiva, Seyedeh Elnaz Naghibi, Caleb Rucker, Ludovic Renson, Christos Bergeles, Kaspar Althoefer, Thrishantha Nanayakkara, Helmut Hauser, Ian Walker – Morph Lab
IEEE International Conference on Intelligent Robots and Systems (IROS)
 SailMAV: design and implementation of a novel multi-modal flying sailing robot. R. Zufferey, A. Ortega, C. Raposo, S. Armanini, A. Farinha, R. Siddall, I. Barasaluce, H. Zhu, M. Kovac - Aerial Robotics Lab
SailMAV: design and implementation of a novel multi-modal flying sailing robot. R. Zufferey, A. Ortega, C. Raposo, S. Armanini, A. Farinha, R. Siddall, I. Barasaluce, H. Zhu, M. Kovac - Aerial Robotics Lab
An Integrated Delta Manipulator for Aerial Repair. P. Chermprayong, K. Zhang, F. Xiao and M Kovac – Aerial Robotics Lab
Dot-to-Dot: Explainable Hierarchical Reinforcement Learning for Robotic Manipulation. Benjamin Beyret, Ali Shafti, A. Aldo Faisal – Brain and Behaviour Lab
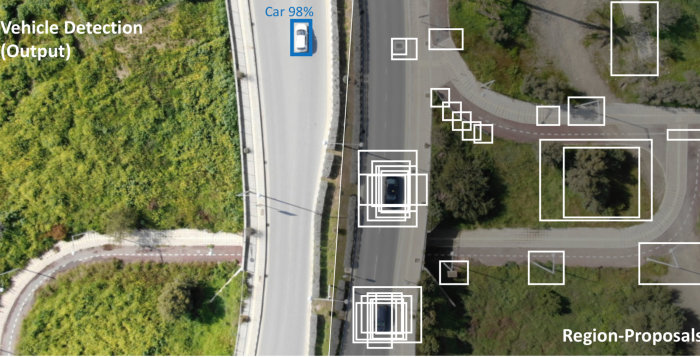
 Informed Region Selection for Efficient UAV-based Object Detectors: Altitude-aware Vehicle Detection with CyCAR Dataset. Alexandros Kouris, Christos Kyrkou and Christos-Savvas Bouganis – iDSL Lab
Informed Region Selection for Efficient UAV-based Object Detectors: Altitude-aware Vehicle Detection with CyCAR Dataset. Alexandros Kouris, Christos Kyrkou and Christos-Savvas Bouganis – iDSL Lab
Augmented Reality Controlled Smart Wheelchair Using Dynamic Signifiers for Affordance Representation, Rodrigo Chacon-Quesada and Yiannis Demiris – Personal Robotics Lab
Inference of user-intention in remote robot wheelchair assistance using multimodal interfaces, Vinicius Barbosa Schettino and Yiannis Demiris – Personal Robotics Lab
Towards Explainable Shared Control using Augmented Reality, Mark Zolotas and Yiannis Demiris – Personal Robotics Lab
 Sim-to-Real Learning for Casualty Detection from Ground Projected Point Cloud Data. Roni Saputra, Nemanja Rakicevic, Petar Kormushev – Robot Intelligence Lab
Sim-to-Real Learning for Casualty Detection from Ground Projected Point Cloud Data. Roni Saputra, Nemanja Rakicevic, Petar Kormushev – Robot Intelligence Lab
 Human robot visual interface for 3D steering of a flexible, bio-inspired needle for brain surgery. Eloise Matheson, Riccardo Secoli, Stefano Galvan, Ferdinando Rodriguez y Baena – MiM Lab
Human robot visual interface for 3D steering of a flexible, bio-inspired needle for brain surgery. Eloise Matheson, Riccardo Secoli, Stefano Galvan, Ferdinando Rodriguez y Baena – MiM Lab
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Eloise Matheson
Department of Mechanical Engineering