Research Themes: Robot Manipulation | Robot Locomotion | Robot Cognition | Robot Design and Control
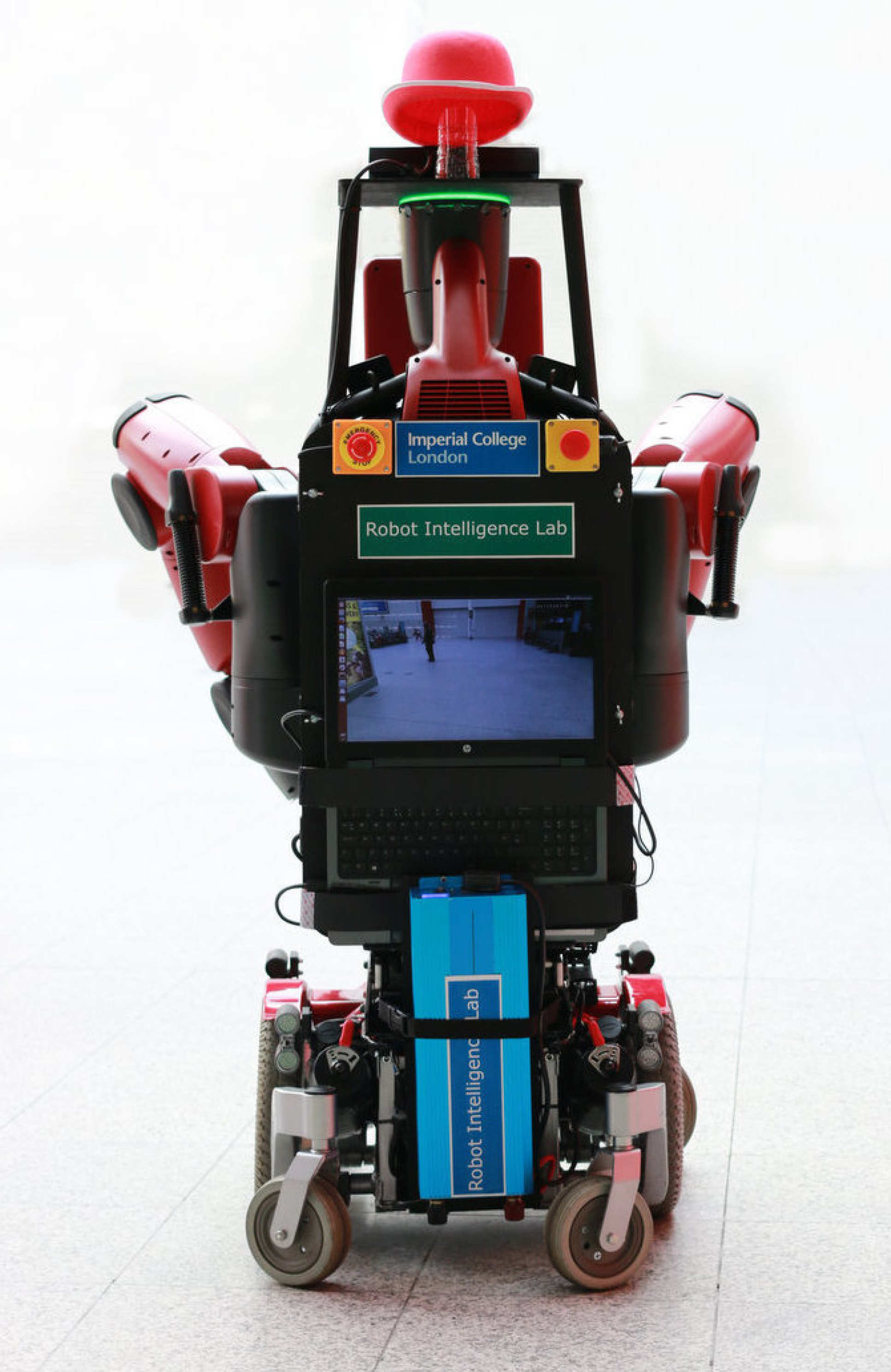
This is our robot DE NIRO (Design Engineering's Natural Interaction Robot). This is the biggest robot in the lab (200 kg weight and 2m height) and also the most user-friendly! Robot DE NIRO has a mobile wheelbase which we repurposed from an electric wheelchair, a liftable torso based on a scissor-like mechanism, a powerful 2kW power inverter for powering the upper body from the batteries in the base, dual arms and a head from a Baxter robot, many additional sensors and accessories on the head (e.g. Kinect 2.0), shoulders (speakers) and hands, and finally - a red hat!
 |
 |
Publications
- Fabian Falck, Sagar Doshi, Marion Tormento, Gor Nersisyan, Nico Smuts, John Lingi, Kim Rants, Roni Permana Saputra, Ke Wang, Petar Kormushev, "Robot DE NIRO: A Human-Centered, Autonomous, Mobile Research Platform for Cognitively-Enhanced Manipulation", In Frontiers in Robotics and AI, 2020.
- Nemanja Rakicevic, Petar Kormushev, "Active Learning via Informed Search in Movement Parameter Space for Efficient Robot Task Learning and Transfer", In Autonomous Robots, Springer, 2019.
- Fabian Falck, Kawin Larppichet, Petar Kormushev, "DE VITO: A Dual-arm, High Degree-of-freedom, Lightweight, Inexpensive, Passive Upper-limb Exoskeleton for Robot Teleoperation", In Proc. 20th International Conference Towards Autonomous Robotic Systems (TAROS 2019), London, UK, 2019. (Best Paper Award)
- Fabian Falck, Sagar Doshi, Nico Smuts, John Lingi, Kim Rants, Petar Kormushev, "Human-centered manipulation and navigation with Robot DE NIRO", In IROS 2018 Workshop: Towards Robots that Exhibit Manipulation Intelligence, IEEE/RSJ Intl Conf. on Intelligent Robots and Systems (IROS), Madrid, Spain, 2018.
- Nemanja Rakicevic, Petar Kormushev, "Efficient Robot Task Learning and Transfer via Informed Search in Movement Parameter Space", In NIPS 2017 Workshop on Acting and Interacting in the Real World: Challenges in Robot Learning, 31st Conference on Neural Information Processing Systems (NIPS), California, USA, 2017.
Videos

DE NIRO crossing a road for the first time
October 2016
This is the first time our robot DE NIRO has crossed a public road!
We managed to turn quite a few heads in South Kensington, next to Royal Albert Hall.
The noise is not from the robot, by the way. DE NIRO's mobile base is extremely quiet.
Video introduction to the lab
October 2016
The research activities of the Robot Intelligence Lab, presented by the Head of the lab - Dr Petar Kormushev
The robot in the video is DE NIRO --- Design Engineering's Natural Interaction Robot.
Robot DE NIRO is based on a Baxter robot that was heavily modified for the purpose of conducting research on mobile manipulation and robot learning.
DE NIRO is alive!
June 2016
DE NIRO (Design Engineering's Natural Interaction Robot) is the first robot in the Dyson School of Design Engineering, Imperial College London. The robot is a member of the Robot Intelligence Lab lead by Dr Petar Kormushev.
DE NIRO is based on a Baxter robot produced by Rethink Robotics that will be modified for conducting research on robot learning.
Tweets about #Robot_DE_NIRO

Contact us

