We do research on agile robot locomotion for bipedal and quadrupedal robots. Two strands of research in locomotion are pursued: bio-inspired and function-centric. The bio-inspired research focuses on emulating animal-like bipedal and quadruped locomotion, including walking, trotting, jumping and running. The second one, function-centric, investigates innovative design and control approaches for locomotion that are not necessarily trying to copy any biological counterpart, such as knee-less legged robots, parallel robots, etc.
We have several robots that we use to study locomotion:
SLIDER - a novel bipedal walking robot without knees.
ResQbot - an autonomous casualty extraction robot.
Robot DE NIRO - Design Engineering's Natural Interaction Robot.
DogBot - a quadrupedal walking robot from React Robotics.
Mobile Robot Fleet - our fleet of four wheeled robots.
Lab members researching robot locomotion: Ke Wang, Roni Permana Saputra, Felix Russell.
Bipedal Walking Gait Generation
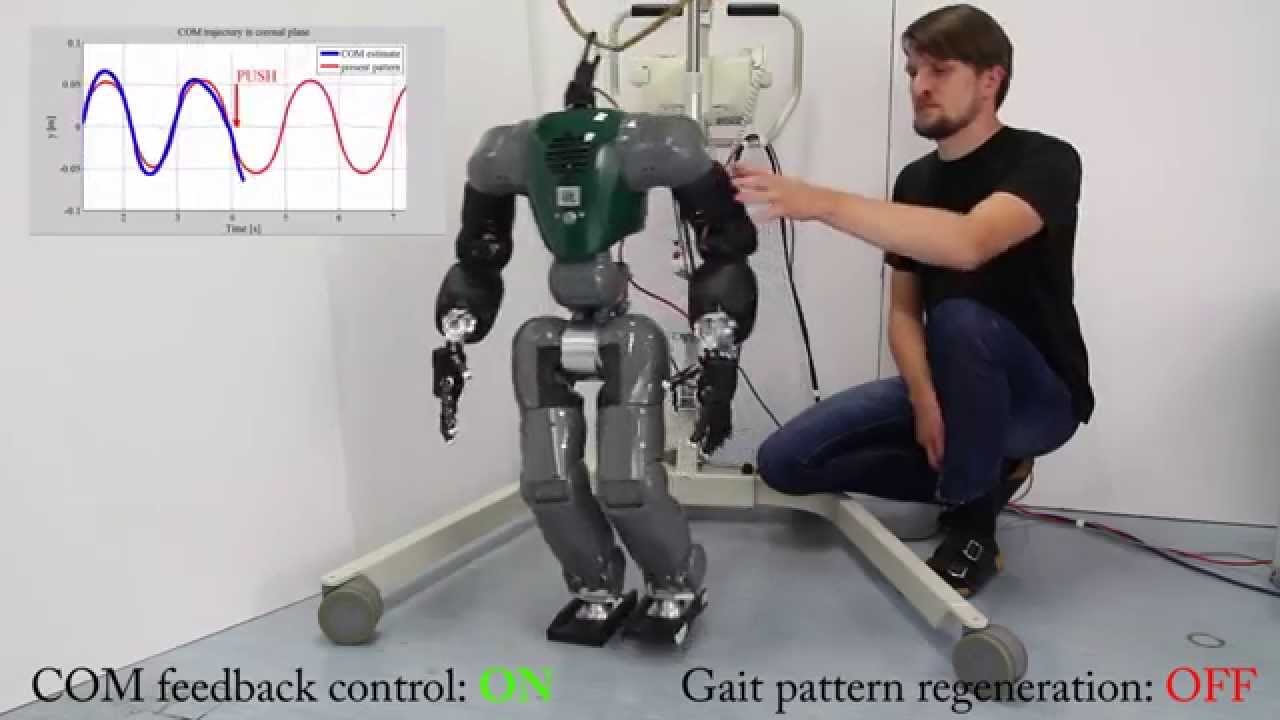
Robot WALK-MAN at DARPA Robotics Challenge

Humanoid robot WABIAN-2R walking with dynamically generated gait

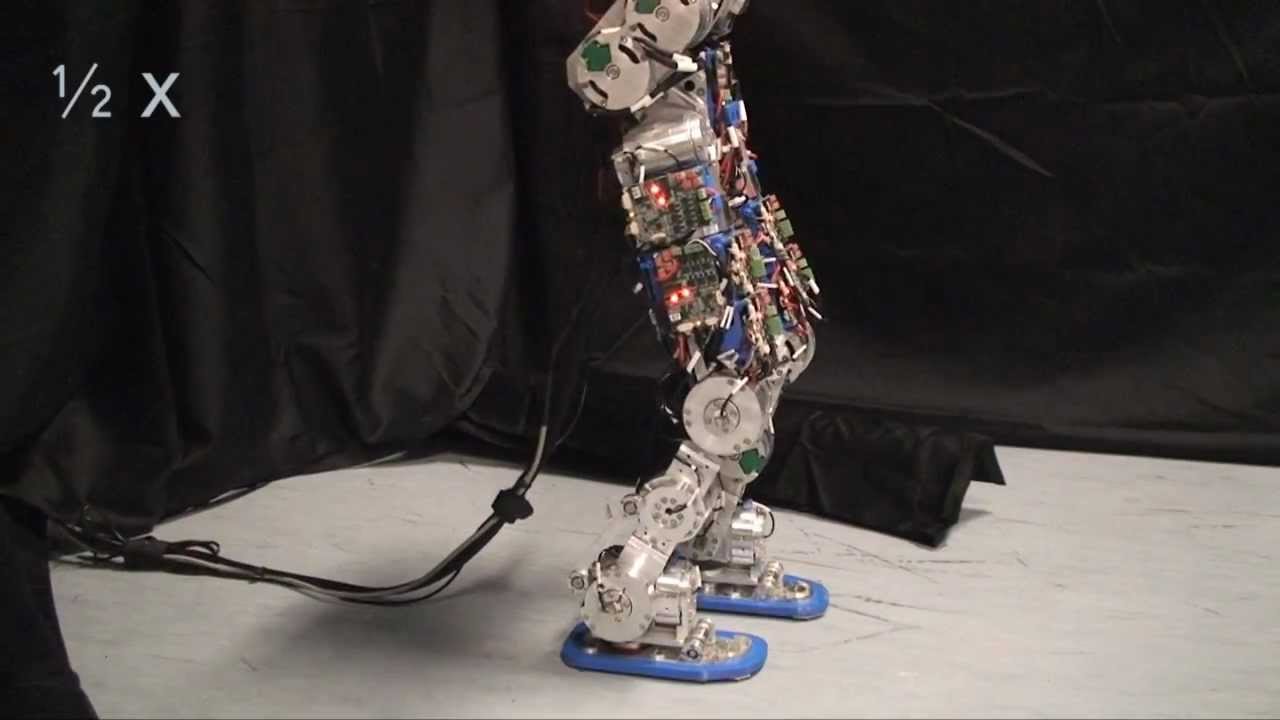
Compliant humanoid robot COMAN learns to walk efficiently
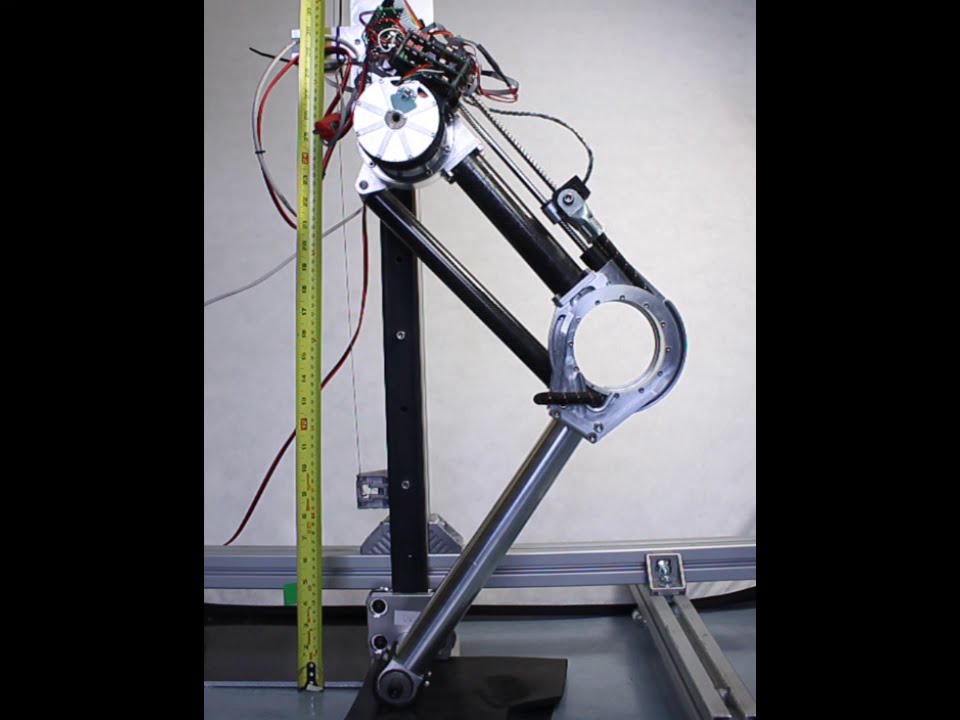
Jumping robot with active and passive compliance
Real-time gait generation for humanoid robots


Contact us

