
f.pardo[at]imperial.ac.ukMy main research focuses on Deep Reinforcement Learning.


Education
 |
2016 – present PhD in Machine Learning Deep Reinforcement Learning @ Imperial College, London, UK |
 |
2014 – 2015 Master's degree in Computer Science AI, ML, Robotics @ Pierre et Marie Curie University, Paris, France |
   |
2012 – 2014 Master’s degree in Cognitive Science Neuroscience, Cognitive Psychology, Computational Modeling, Neuroimaging, AI @ École Normale Supérieure Ulm, EHESS and Descartes University, Paris, France |
|
2009 – 2012 Bachelor's degree in Computer Science @ Pierre et Marie Curie University, Paris, France |
Research Internships
 |
2019 Motor primitives and competitive self-play Raia Hadsell, Nicolas Heess, Josh Merel and Leonard Hasenclever @ DeepMind, London, UK |
 |
2015 Deep reinforcement learning for autonomous robot navigation from vision Tetsunari Inamura @ National Institute of Informatics, Tokyo, Japan |
 |
2014 Multimodal concepts emergence for a humanoid robot in interaction with a human tutor David Filliat @ Flowers laboratory, Inria and ENSTA ParisTech, Paris, France |
 |
2013 Optimal decision making based on a mixture of prediction experts Homeostatic engine for reinforcement learning agents Laurent Orseau @ Inria and AgroParisTech, Paris, France |
 |
2013 Ontology visualization methods and their impact on short-term memory storage in humans Jean-Gabriel Ganascia @ Lip6, Paris, France |
Publications
 |
CoMic: Complementary Task Learning & Mimicry for Reusable Skills Leonard Hasenclever, Fabio Pardo, Raia Hadsell, Nicolas Heess, Josh Merel @ ICML 2020 Paper and code |
 |
Scaling All-Goals Updates in Reinforcement Learning Using Convolutional Neural Networks Fabio Pardo, Vitaly Levdik, Petar Kormushev @ AAAI 2020 @ NeurIPS 2018 Deep RL Workshop @ ICML 2018 Exploration in RL Workshop Paper, poster, website and code |
  |
Time Limits in Reinforcement Learning Fabio Pardo, Arash Tavakoli, Vitaly Levdik, Petar Kormushev @ ICML 2018 @ NIPS 2017 Deep RL Symposium Paper, poster and website |
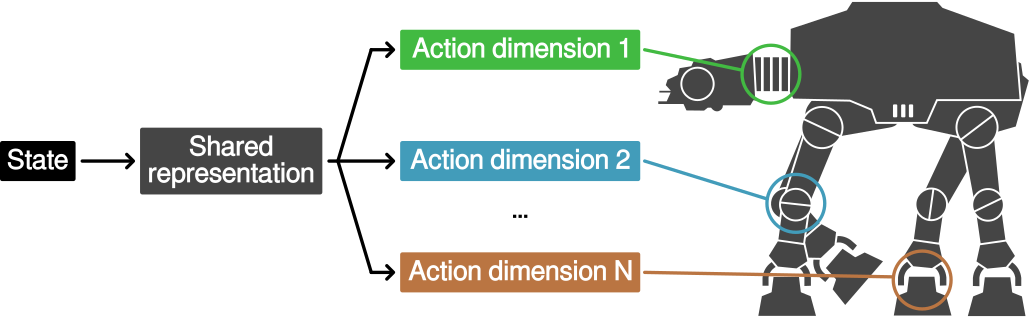 |
Action Branching Architectures for Deep Reinforcement Learning Arash Tavakoli, Fabio Pardo, Petar Kormushev @ AAAI 2018 @ NIPS 2017 Deep RL Symposium Paper and poster |
Softwares
  |
Tonic: A Deep Reinforcement Learning Library for Fast Prototyping and Benchmarking
|
Miscellaneous
|
2016 – present Graduate teaching assistant Computing and Robotics @ Imperial College, London, UK |
 |
2011 and 2012 Twice finalist of Prologin, the French national programming contest Algorithmic tests and 36-hour hackathon @ École Polytechnique and EPITA, Paris, France |

Contact us
Senior Lecturer (Associate Professor)
Dyson School of Design Engineering
E-mail: p.kormushev@imperial.ac.uk
Address: 25 Exhibition Road, South Kensington, London, SW7 2DB

