Our Hamlyn researchers proposed a distributed force control scheme for micro-robot manipulation, aiming to assist various cell surgery applications.
In cell surgery applications, cells must be oriented properly to enable the microsurgical tool to access the target components with minimum damage to cells. Therefore, orientation control of biological cells is extremely crucial.
In traditional biological applications such as intra-cytoplasmic sperm injection, out-of-plane rotation is generally performed manually by operating two micro-pipettes to repeat vacuum aspiration and release of the mature oocyte until it is oriented at a desired pose.
The efficiency and precision for orientation control is thus limited and prone to manual manipulation errors. Hence, the use of micro-robots would greatly simplify such tasks.
Optical tweezers (OT) represent a versatile tool for micro-manipulation of micro-robots. To avoid damages to living cells caused by illuminating laser directly on them, micro-robots controlled by OT can be used for manipulation of cells or living organisms in microscopic scale. In addition, translation and planar rotation motion of micro-robots can be realised by using a multi-spot planar OT.
In spite of that, out-of-plane manipulation of micro-robots is difficult to achieve with a planar OT until these days, owing to its complex and costly settings.
A distributed force control scheme for micro-robot manipulation via planar multi-spot optical tweezer
In view of this, our research team at the Hamlyn Centre proposed a distributed force control scheme for micro-robot manipulation via planar multi-spot OT, which can control the out-of-plane pose of a micro-robot along multiple axes.
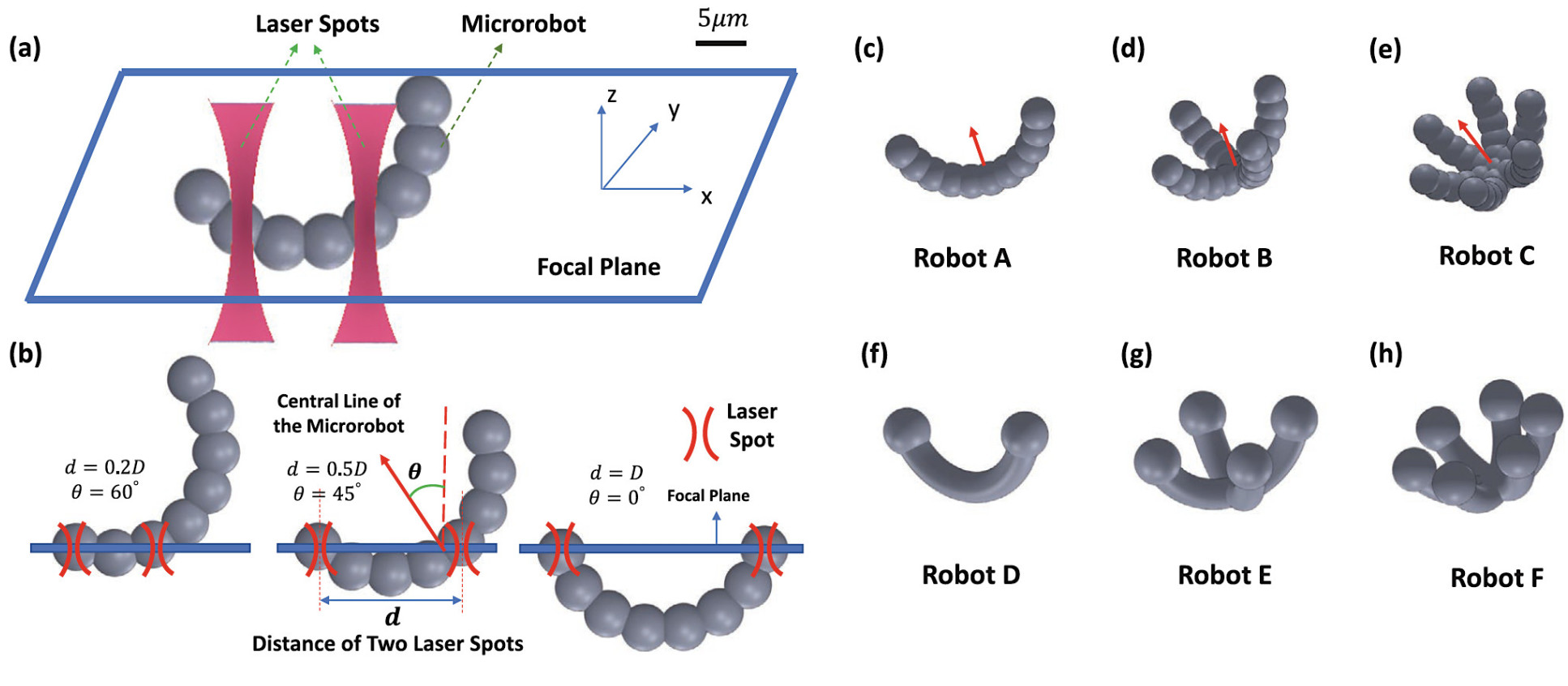
Overview of the physical mechanism and structure design for micro-robot out-of-plane rotation via planar OT.
A general mathematical model is used to construct a series of micro-robots for the implementation of out-of-plane control along multiple axes, which has potential applications for micro-object manipulation.
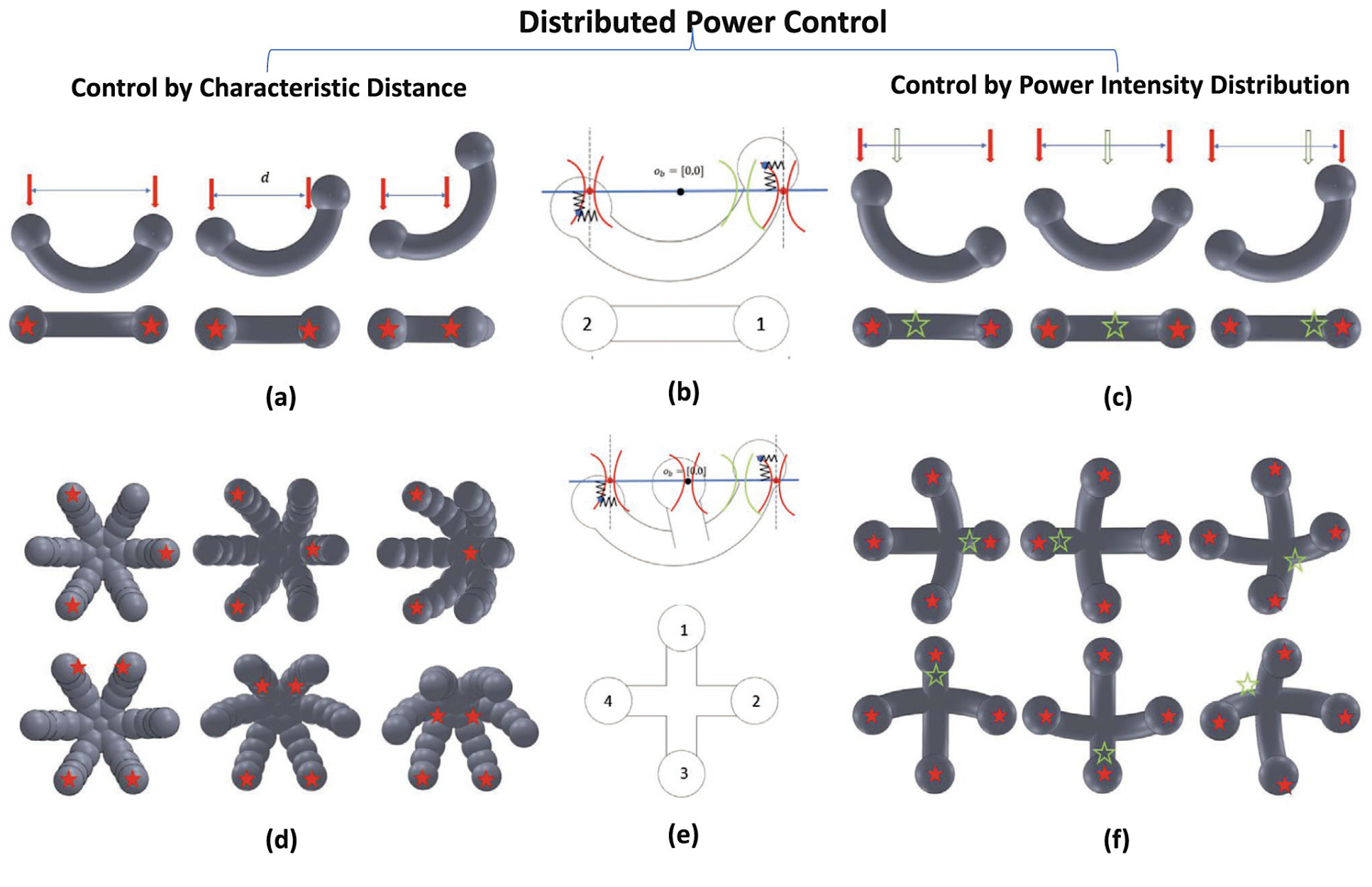
Two distributed force control strategies are proposed and investigated, namely Control Based on Various Characteristic Distance (Control Strategy A) and Control Based on Various Power Intensity Distribution (Control Strategy B).
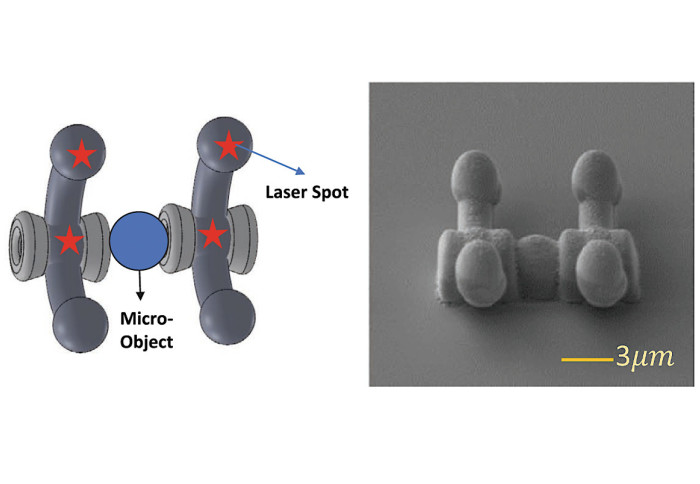
Illustration of the distributed force control strategy. (a) Illustration of the characteristic distance based control for the one-arm microrobot. (b) Illustration of the virtual spring theory for the one-arm microrobot control. (c) Illustration of the out-of-plane control for the one-arm microrobot based on various power intensity distribution. (d) Illustration of the characteristic distance based control for the two-arm microrobot. (e) Illustration of the virtual spring theory for the two-arm microrobot control. (f) Illustration of the out-of-plane control for the two-arm microrobot based on various laser power intensity distribution
Different micro-robot designs are investigated and fabricated for experimental validation. The structure design of the micro-robot and the investigation of two control strategies enable the control of out-of-plan rotation of optical micro-robots via planar OT.
The control input is the range of planar motions or power intensity distribution of the laser spots while the output is the multi-dimensional (6D) pose of the micro-robot.
Our researchers pointed out that such optically driven micro-robots can be used for complex manipulation in a closed environment, such as a micro-fluidic chip. It can also assist cell surgery by providing dexterous manipulation.
Moreover, the proposed scheme can be potentially applied to various cell surgery applications, including single-cell analysis, embryo injection, nucleus transplantation, organelle biopsy in precision medicine, bottom-up cell assembly for tissue engineering, or other assembly tasks.
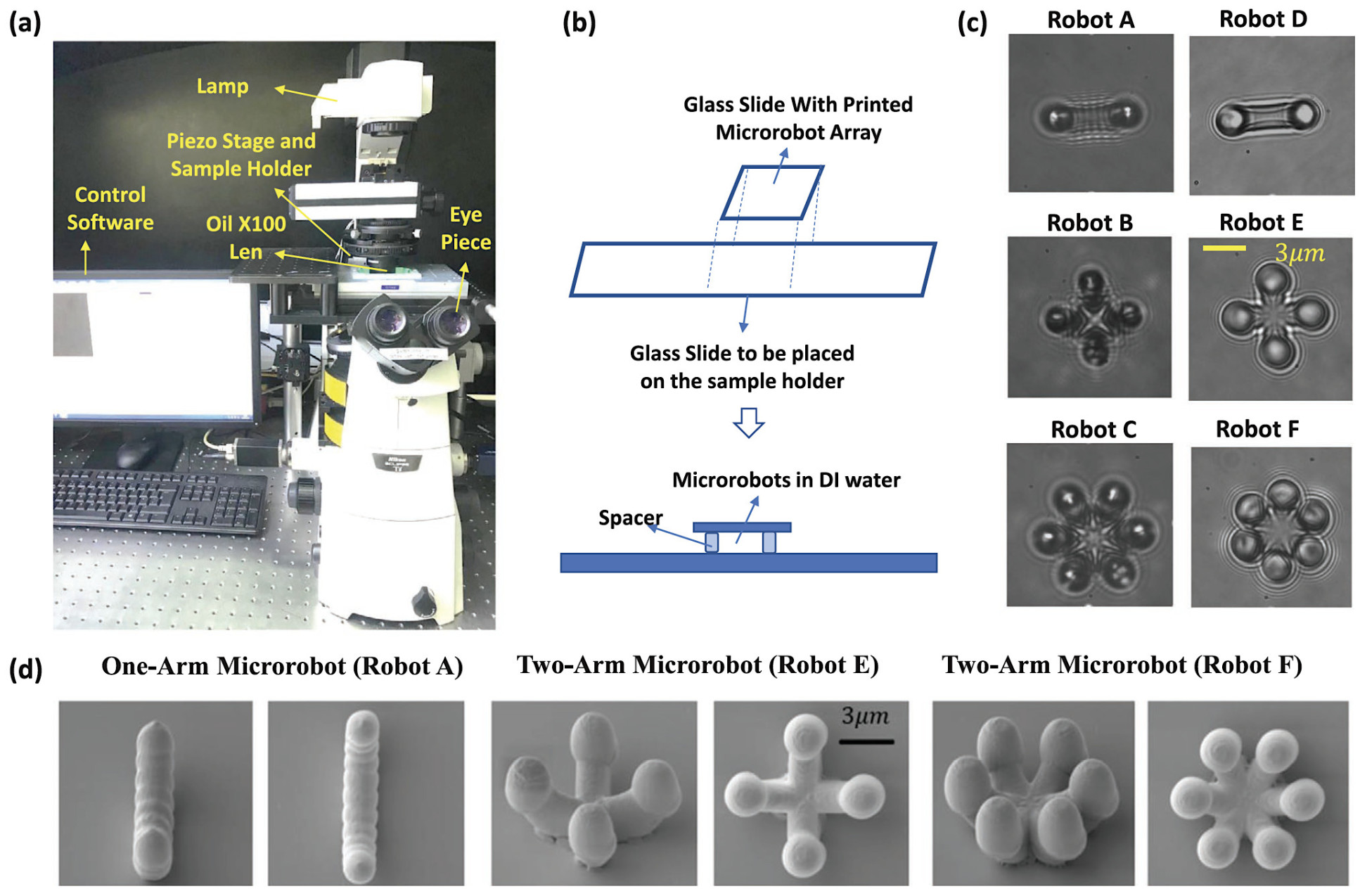
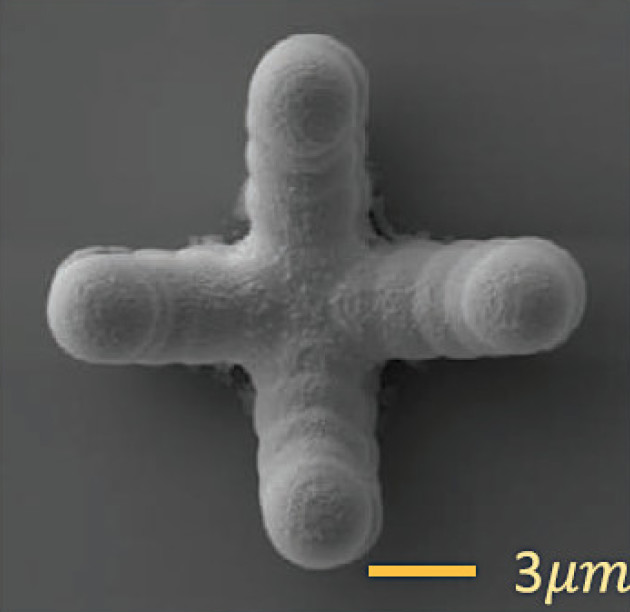
An overview of the microrobots and their experimental environment. a) The physical optical tweezer system. b) The schematic diagram of the environment for microrobot operation. c) Microscopic view of the Robot A-F for manipulation with OT. d) Different views of the SEM images of three typical microrobots with different number of arms.
Overall, the main contributions of this research can be concluded as follows:
Development of a generic model for the structure design of micro-robots which enables multi-dimensional (6D) control via conventional multi-spot OT.
Distributed force control of the microrobot with two additional holders and the evaluation of indirect manipulation.
Introduction of two distributed force control strategies for micro-robot manipulation based on characteristic distance and power intensity distribution.
Experiments are performed to demonstrate the effectiveness of the proposed method and the potential applications that this model can be applied to (including indirect manipulation of micro-objects).
The structure design and the control strategies are both applicable to HOT (holographic optical tweezer) or other types of conventional OT systems, where the focal points of optical traps are limited to the focal plane. It goes without saying that, adding more degrees of freedom by using the micro-robot design is the first step toward fibre-based optical trap compatible micro-robot.
Such micro-robots can be used as a tool at the tip of a fibre to manipulate micro-objects or implement tissue biopsy using the optical traps generated by multiple optical fibres. In addition, it can be used as a dexterous tool for lab-on-the-chip to realise cell diagnosis.
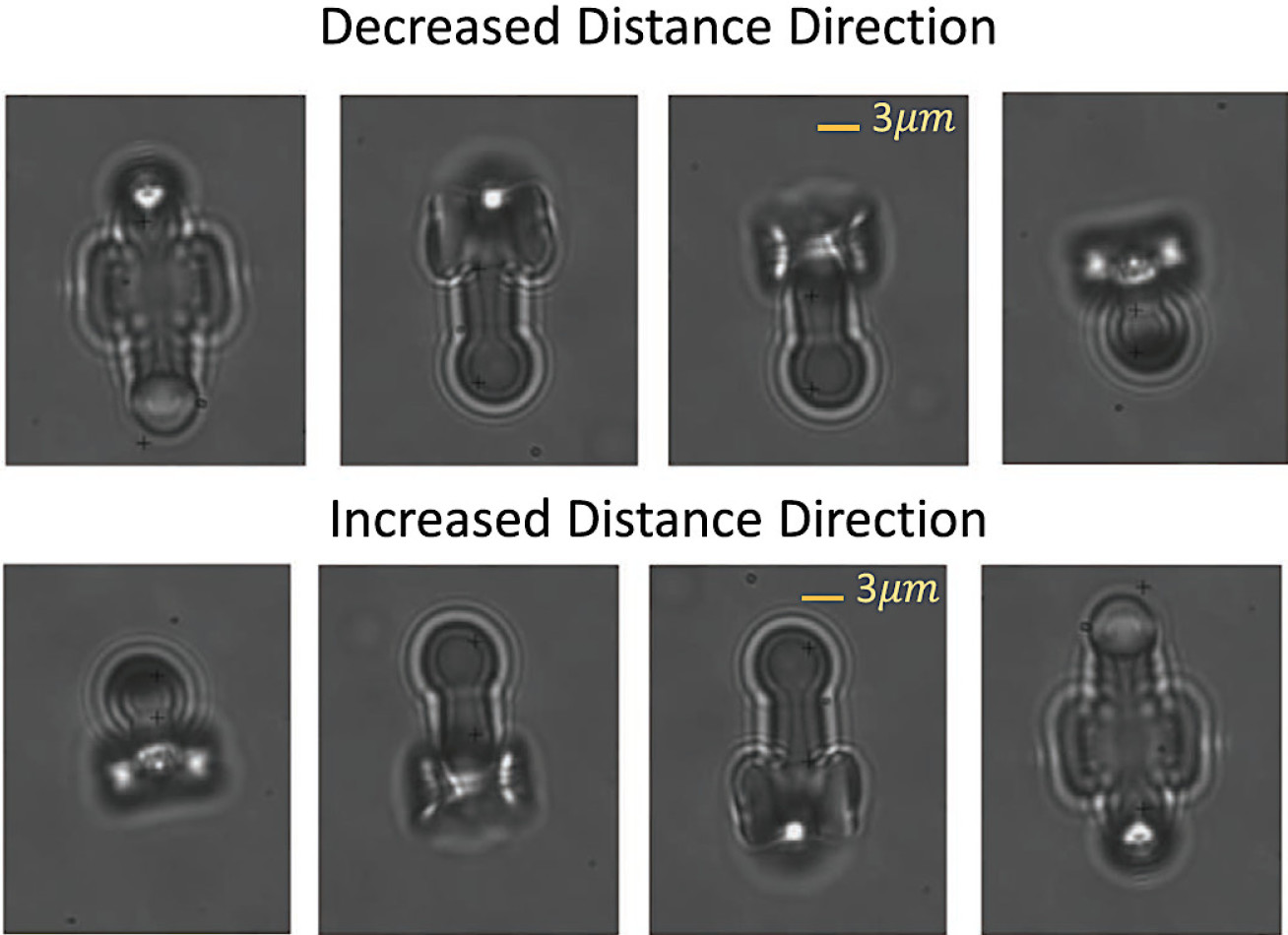
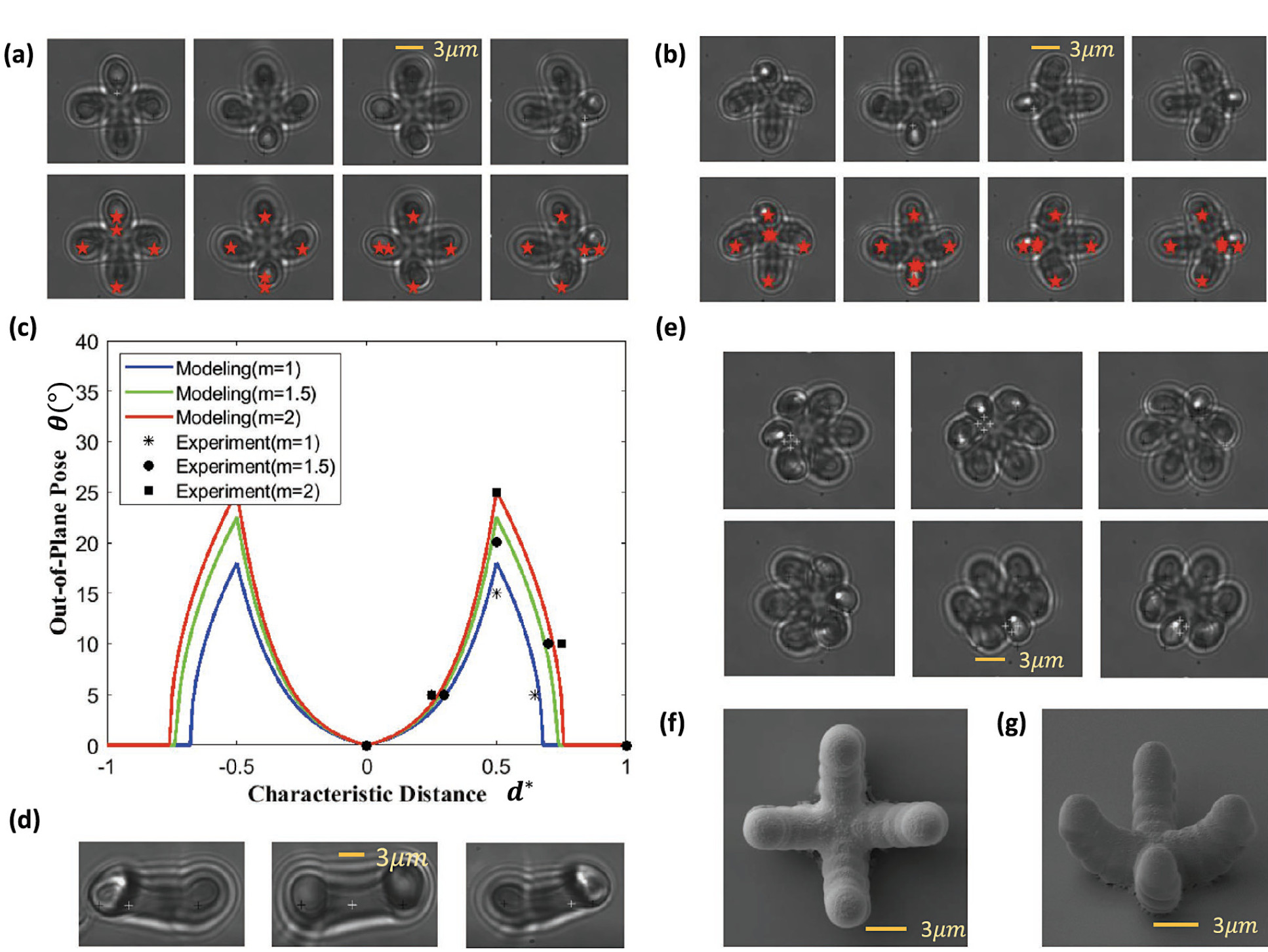
Experiments for power intensity distributed control (control strategy B) for various microrobots.
 The efficiency and precision for orientation control is thus limited and prone to manual manipulation errors. Hence, the use of micro-robots would greatly simplify such tasks.
The efficiency and precision for orientation control is thus limited and prone to manual manipulation errors. Hence, the use of micro-robots would greatly simplify such tasks.