A Comparative Review of Artificial Muscles for Microsystem Applications
Hamlyn researchers provided a comparative review of artificial muscles for microsystem applications, aiming to aid the development of clinical devices
With the miniaturisation of electronics and the development of machine intelligence, various advanced electronic devices have been increasingly deployed in a wide range of living environments in the last few decades. Frequent and close human-machine interactions require devices that are soft, small-scale, lightweight, and power efficient.
The corresponding author of this review paper, Dr Mayue Shi, said: "artificial muscles are a category of soft actuators which can mimic the properties of natural muscle, and are particularly suitable for human-machine interaction applications because of their soft and tough mechanical properties, flexible drive mechanisms, low fabrication complexity, and acceptable efficiency at a miniature scale."
Indeed, artificial muscles are capable of generating actuation in microsystems with outstanding compliance. With a growing academic interest in artificial muscles and their applications in many areas, such as soft robotics and biomedical devices, a thorough systematic review is needed to act as a general guidance for both academic research and the development in clinical practice.
A Comparative Review of Artificial Muscles for Microsystem Applications
In view of this, our research team at the Hamlyn Centre provided a comparative review with practical opinions on the application and development of artificial muscles in micro-systems, based on previous reviews and some of the more recent developments.
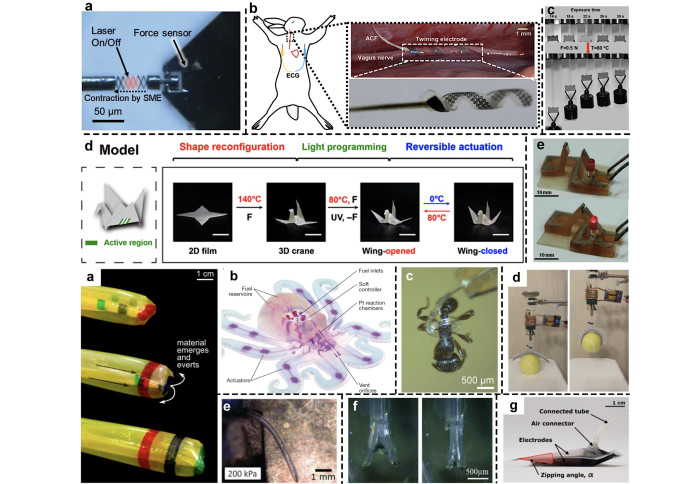
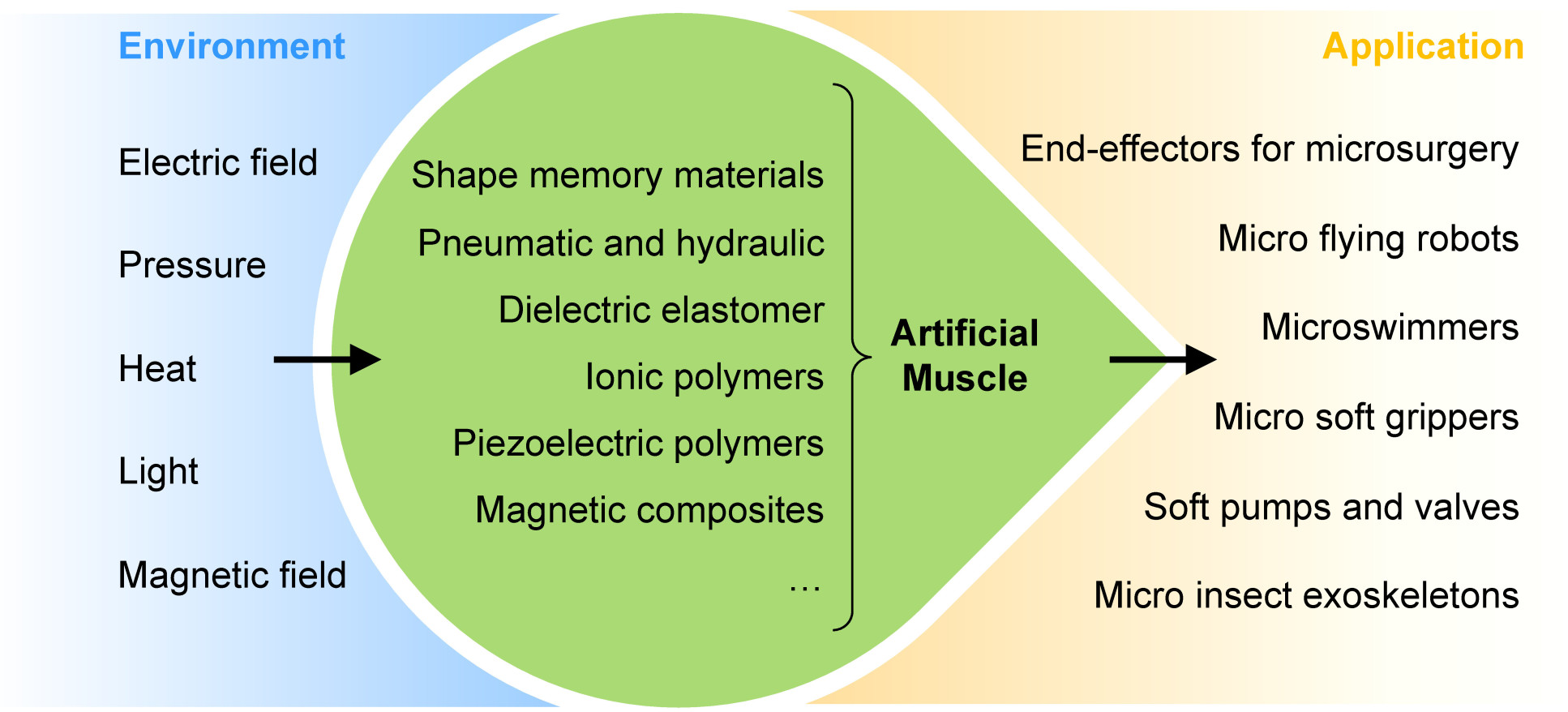
Our researchers provided an overview of artificial muscles based on six important actuation principles, including shape-memory alloys and polymers, pressure-based actuators, dielectric elastomers, ionic polymer-metal composites, piezoelectric artificial muscles and soft magnetic artificial muscles.
The advantages and limitations of artificial muscles are carefully analysed and compared. In addition, suitable artificial muscle mechanisms are suggested for specific microsystem applications (based on the unique application requirements and electrical and mechanical properties of the muscle types).
"We hope this review can be a reference for the selection of different artificial muscles in the development of clinical devices, and promote the utilisation of soft actuators in clinical practice" Dr Mayue Shi said.
Moreover, in this review paper our research team also introduced a multistage energy and actuation management paradigm for energy-autonomous micro-systems.
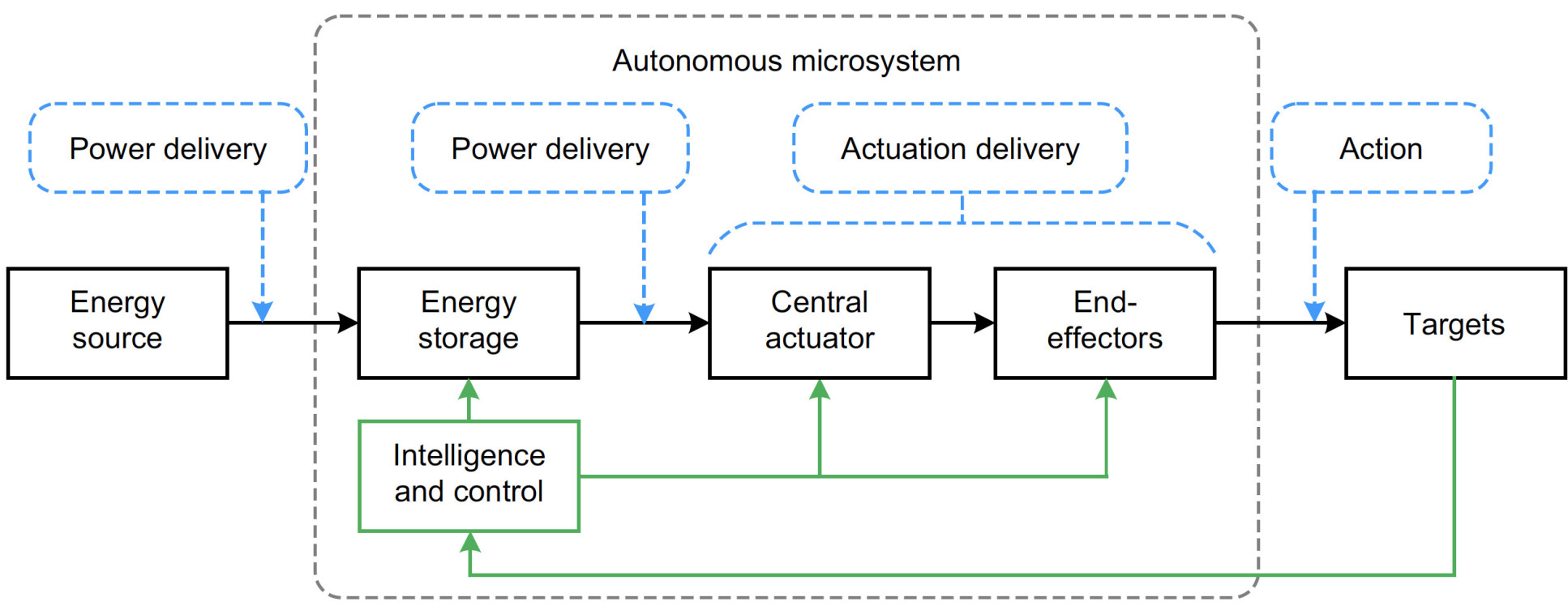
Our researchers discussed potential strategies for energy delivery, conversion, and storage to promote the energy autonomy of micro-robotic systems at a system level.
Dr Mayue Shi further stated that: "we hope the discussion on energy and actuation management is helpful for researchers focusing on autonomous micro-robots and high-efficiency end-effectors for clinical applications."
This research was supported by EPSRC Programme Grant “Micro-robotics for Surgery (EP/P012779/1)” (Mayue Shi and Eric M. Yeatman, "A comparative review of artificial muscles for microsystem applications",Microsystems & Nanoengineering, November 2021).
Article supporters
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Erh-Ya (Asa) Tsui
Enterprise