Dyson School Excels in Amazon-Imperial Robotics Awards

Three Dyson School of Design Engineering PhD students sweep top honors in the 2023 Robotics Forum - Amazon PhD Awards
In a celebration of achievements in the field of robotics, three PhD students from Dyson School of Design Engineering have secured victory in all three categories of the prestigious Robotics Forum - Amazon PhD Prizes for Outstanding Achievement in Robotics. The award recognises outstanding PhD research contributions in the early, mid, and late-stage categories, highlighting the cutting-edge work being done at the intersection of technology and robotics.
Origami Endoscopy for Early Diagnosis
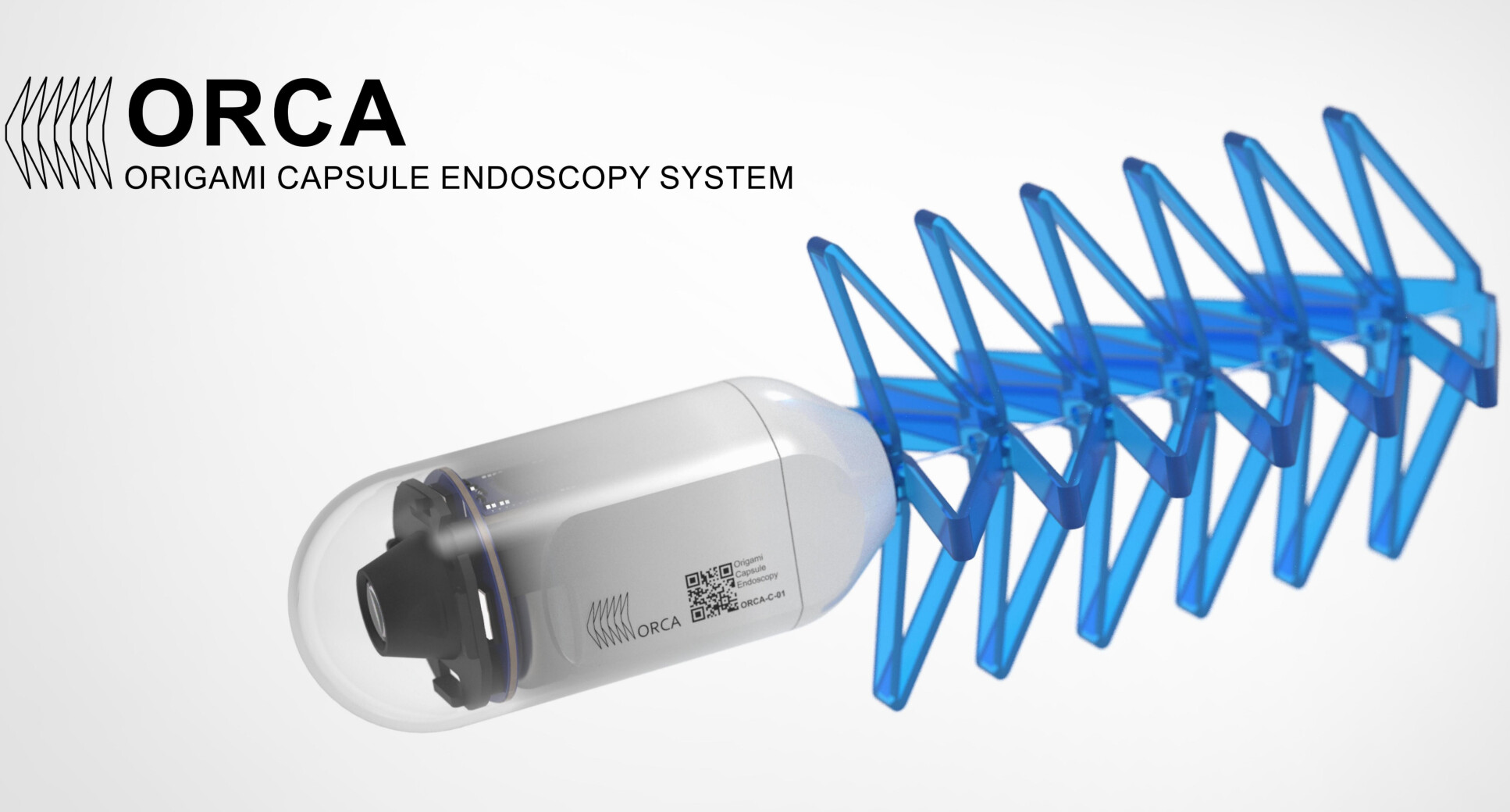
Yukun Ge from the Dyson School of Design Engineering emerged as the winner in the early-stage category of the Amazon-Imperial Robotics Awards. His work addresses a critical limitation of current capsule endoscopes - the lack of a propulsion system due to space constraints for a sufficient battery.[1]
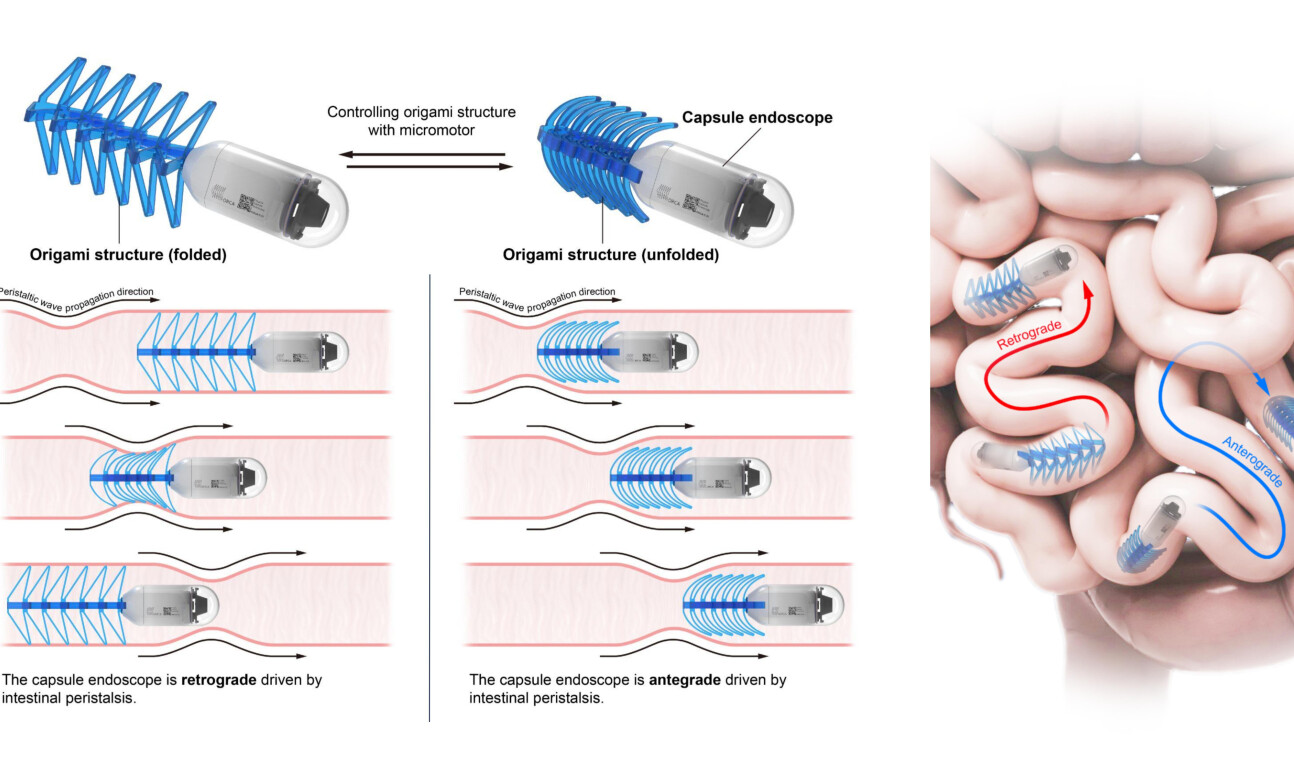 Yukun’s research introduces an origami structure inspired by the shape of a feathered compound leaf. This innovative design allows the capsule endoscope to be propelled forward by the peristalsis of the intestines when folded and pushed in the opposite direction when unfolded. With minimal energy requirements to control the unfolding or folding of the origami structure, Yukun has transformed it into a flexible sensor, capable of detecting early-stage tumours that are challenging to identify with traditional capsule endoscopes.
Yukun’s research introduces an origami structure inspired by the shape of a feathered compound leaf. This innovative design allows the capsule endoscope to be propelled forward by the peristalsis of the intestines when folded and pushed in the opposite direction when unfolded. With minimal energy requirements to control the unfolding or folding of the origami structure, Yukun has transformed it into a flexible sensor, capable of detecting early-stage tumours that are challenging to identify with traditional capsule endoscopes.
"I am extremely grateful to my supervisor, Thrish, for encouraging me to try various interesting ideas and for providing encouragement when I encountered bottlenecks in my research." Yukun Ge Research Postgraduate Dyson School of Design Engineering - Faculty of Engineering
Yukun expressed his gratitude to his supervisor Professor Thrishantha Nanayakkara, stating, “I am extremely grateful to my supervisor, Thrish, for encouraging me to try various interesting ideas and for providing encouragement when I encountered bottlenecks in my research.” He remains optimistic about the commercial potential of origami endoscopy technology and believes in the technology's capacity to evolve from its initial stages to maturity, ultimately benefitting patients with specific medical needs.
Innovating Real-Time Multi-Modal Sensor Integration
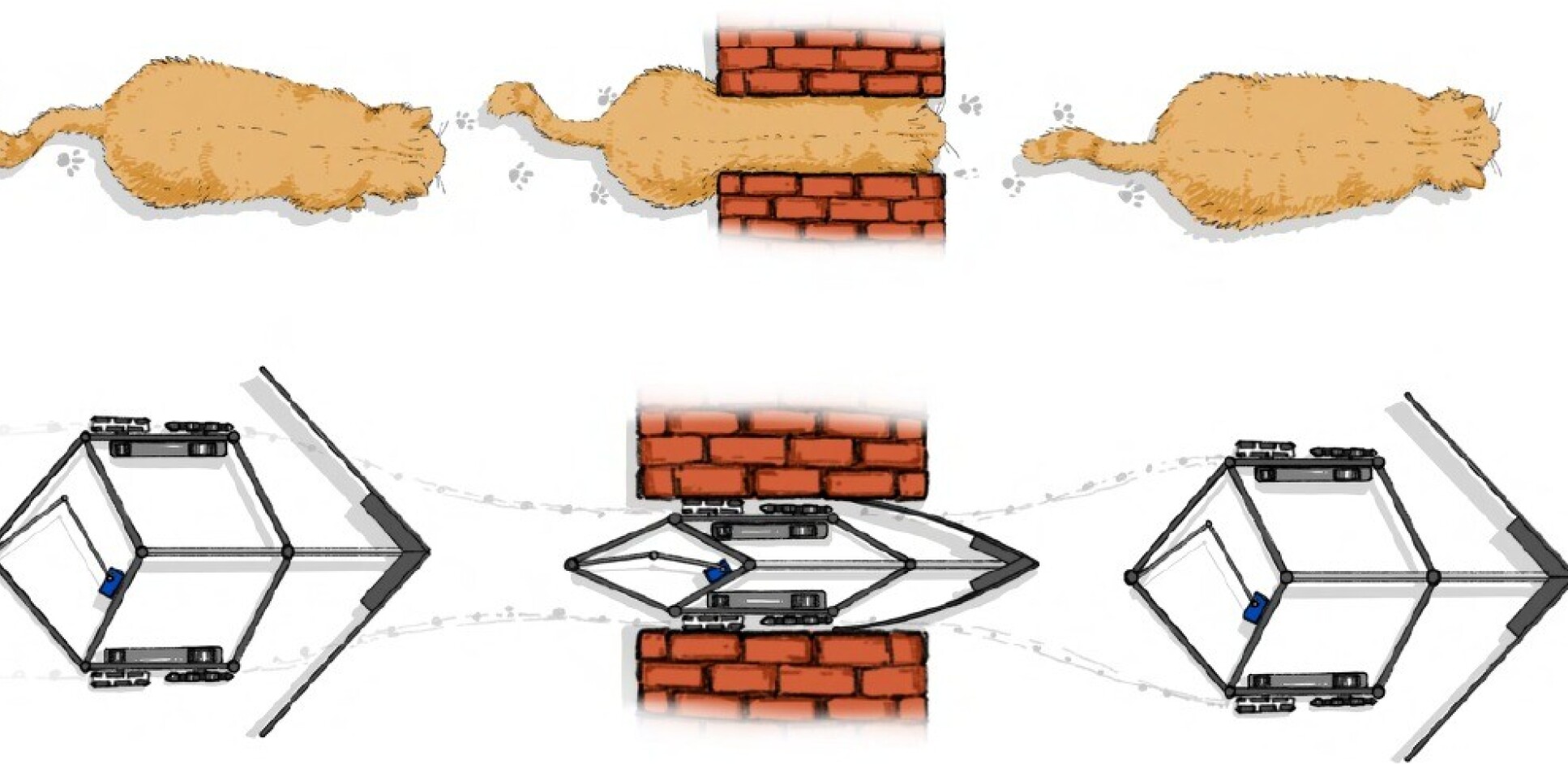
Moving to the mid-stage category, Barry Mulvey stood out as a winner for his work in real-time multi-modal sensor integration for robots navigating unstructured environments. Under the valued guidance of Professor Thrishantha Nanayakkara in the Morph Lab, Barry's research centres around the development of a bio-inspired deformable mobile robot which can change shape in response to real-time proprioceptive feedback to navigate different obstacles and apertures [2].
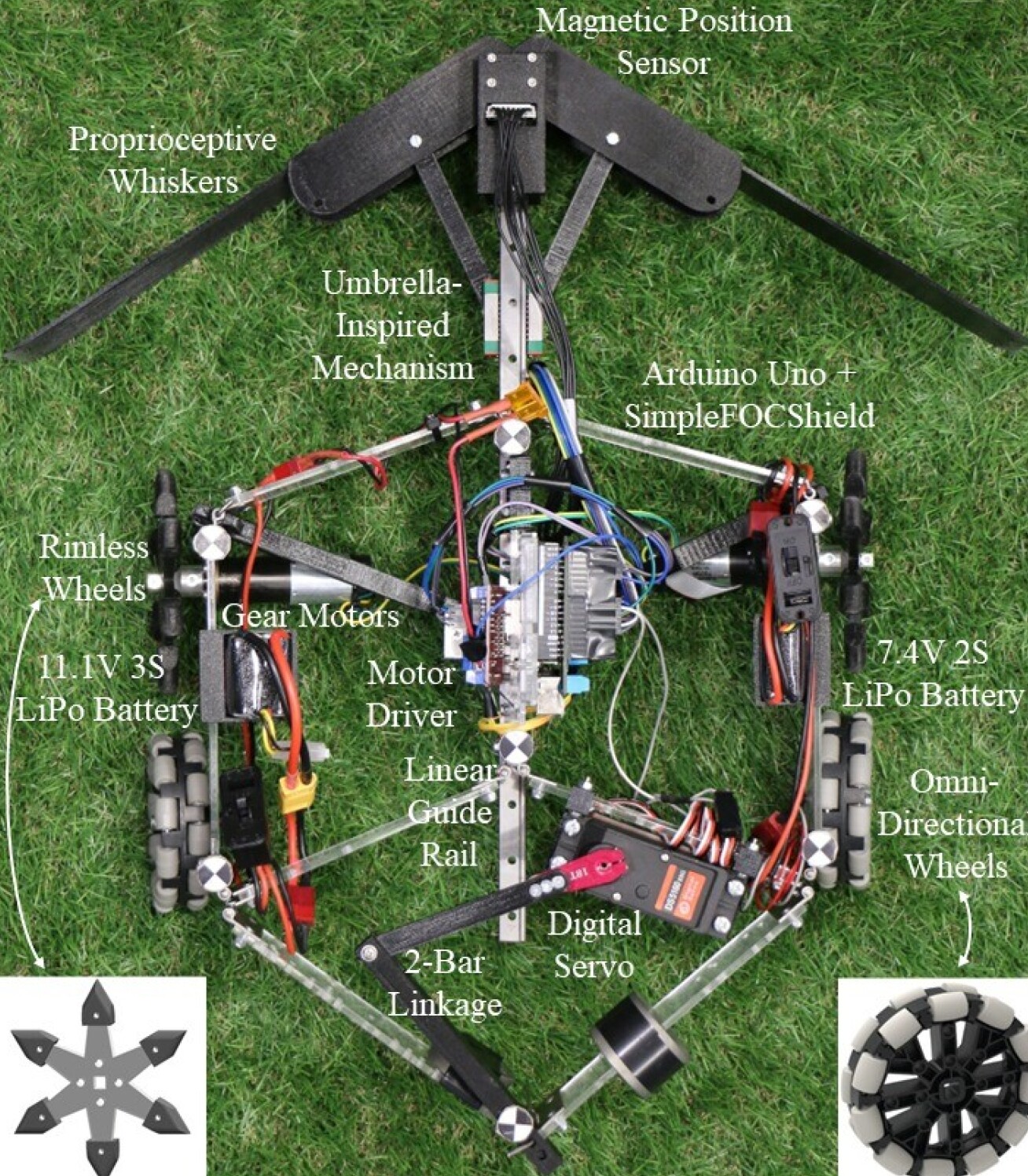
His research draws inspiration from animals such as cats, that can readjust their body dimensions depending on their surroundings. Barry's work underscores the importance of embodied intelligence, showcasing the potential of soft or shape-changing robots in representing bio-inspired artificial intelligence. This co-development of embodied perception and actuation capabilities can result in improved performance of mobile robots in unstructured environments.
Barry expresses gratitude for the interest in his work and recognition received from Amazon and the Imperial Robotics Forum, fuelling his inspiration for future endeavours.
Human-Centred Advances in Myoelectric Prosthetic Hands
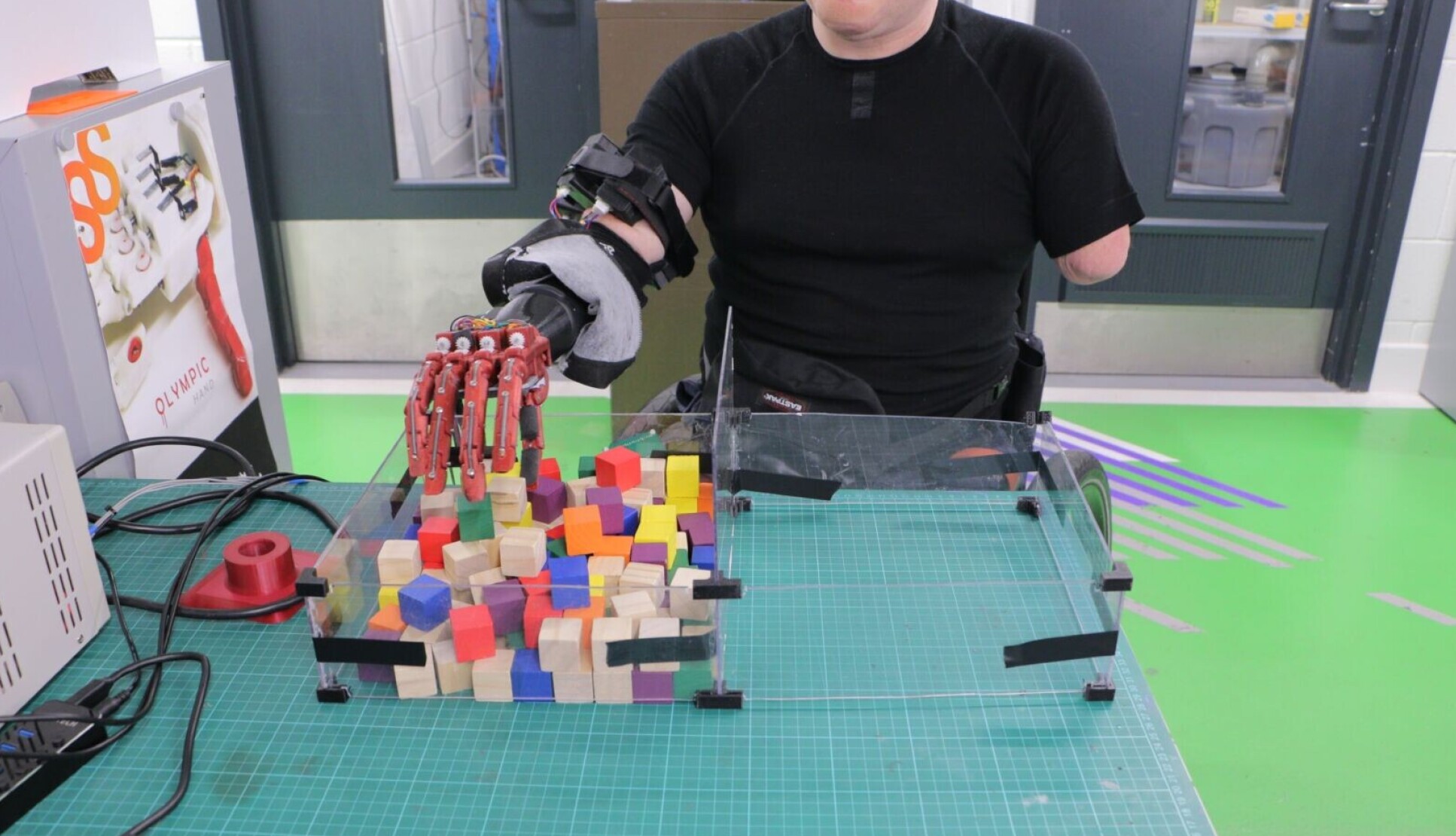 In the late-stage category, Digby Chappell takes the spotlight for his transformative work in advancing myoelectric prosthetic hands. Building on more than 75 years of research in the field, Digby's four-year journey at Imperial College London's Dyson School of Design Engineering focuses on improving the control and usability of prosthetic hands through a human-centred approach.
In the late-stage category, Digby Chappell takes the spotlight for his transformative work in advancing myoelectric prosthetic hands. Building on more than 75 years of research in the field, Digby's four-year journey at Imperial College London's Dyson School of Design Engineering focuses on improving the control and usability of prosthetic hands through a human-centred approach.

Digby's research encompasses various aspects, including the development of virtual reality training platforms, novel control and sensory feedback methods, and reimagining the very essence of prosthetic hands. Recognising the complex relationship between prosthesis and user, Digby's goal is to make prosthetic hands a more viable and useful option for the substantial percentage of adults with upper limb difference that are overlooked by existing prosthetic technology.
Reflecting on the experience, he encourages fellow PhD students to engage in future competitions, highlighting the diverse community of researchers at the Imperial Robotics Forum.
[1] Ge, T. D. Lalitharatne and T. Nanayakkara, "Origami Inspired Design for Capsule Endoscope to Retrograde Using Intestinal Peristalsis," in IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 5429-5435, April 2022, doi: 10.1109/LRA.2022.3157406.
[2] B. W. Mulvey, T. D. Lalitharatne, and T. Nanayakkara, “DeforMoBot: A bio-inspired deformable mobile robot for navigation among obstacles,” IEEE Robotics and Automation Letters, vol. 8, no. 6, pp. 3828-3835, June 2023, doi: 10.1109/LRA.2023.3273393.
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Sanjana Kakar
Department of Materials