Variable Friction Manipulation
Dexterity is often achieved in robotic grippers by increasing the number of degrees of freedom (DOF). We take an alternative approach of modifying the friction of robotic fingertips.
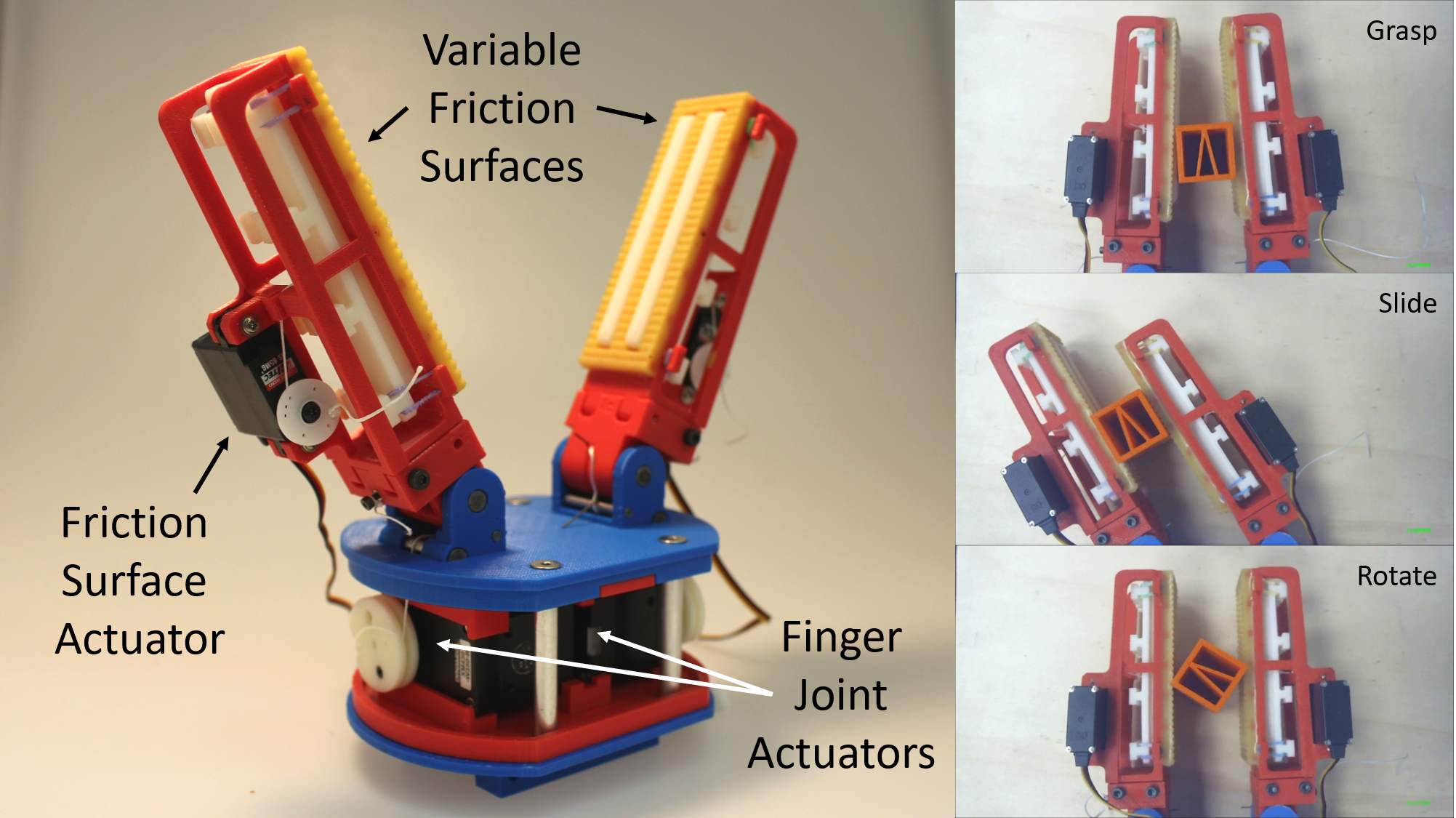
The original Variable Friction Gripper was developed by Dr Spiers while a member of Yale University's GRAB Lab.
Read the original Paper: Spiers AJ, Calli B, Dollar AM, 2018, Variable-friction finger surfaces to enable within-hand manipulation via gripping and sliding, IEEE Robotics and Automation Letters, Vol:3, ISSN:2377-3766, Pages:4116-4123
You can download the CAD files for the original Model VF Gripper.
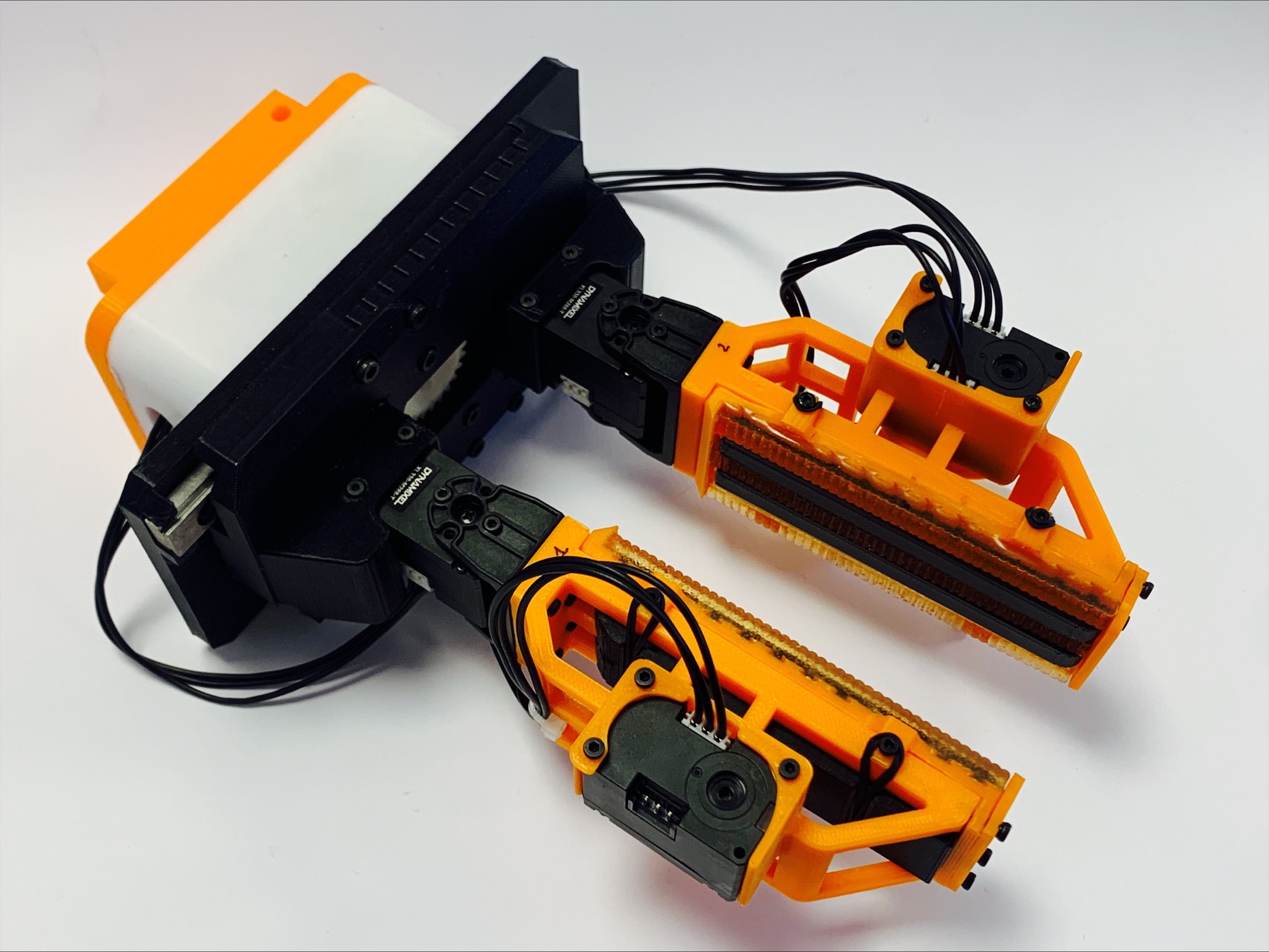
We are developing a new version of the variable friction gripper that is easier and cheaper to build and control. Watch this space!