ROAG Dataset
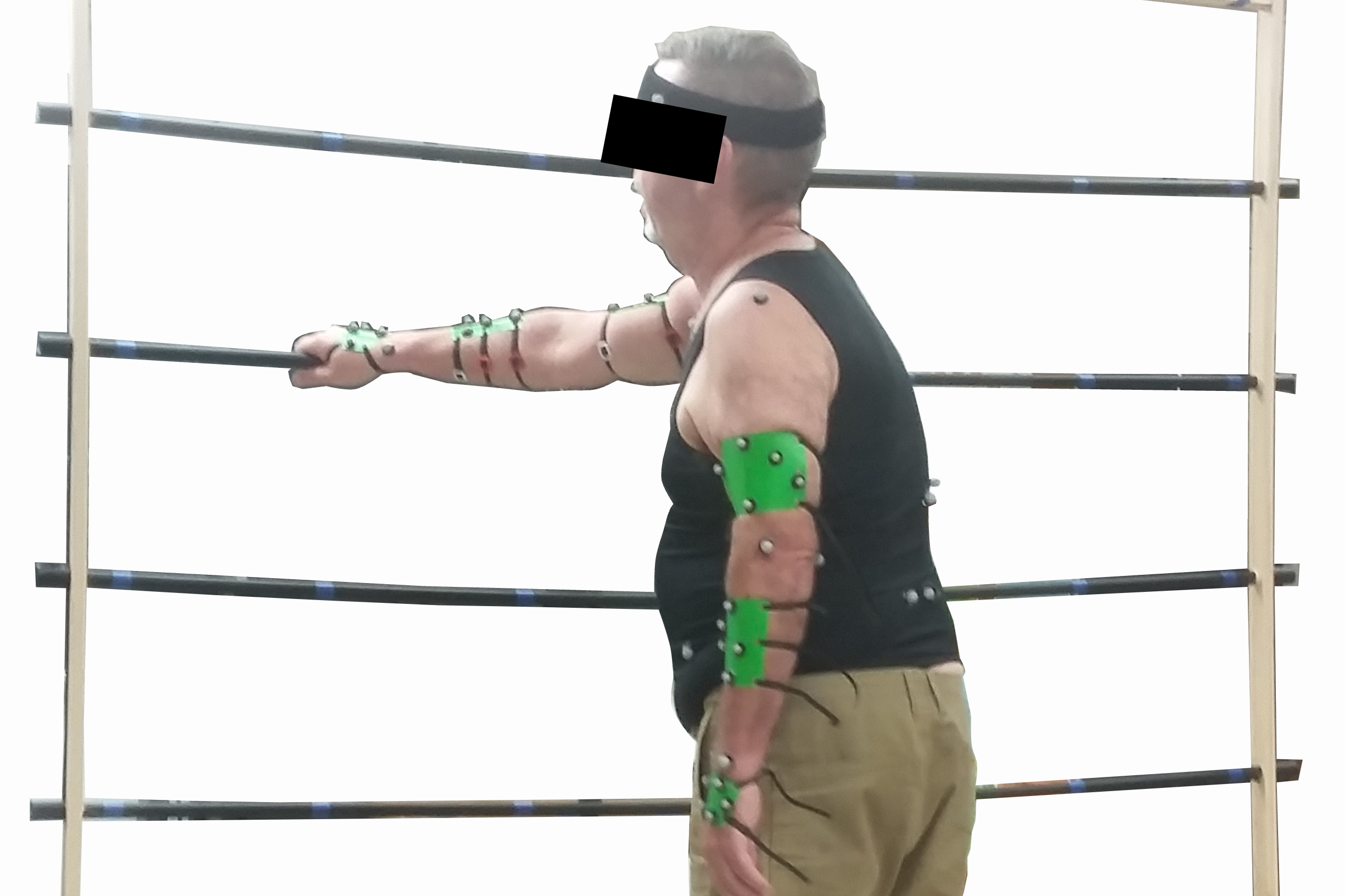 ROAG is a motion capture dataset involving arm and torso pose during reach-to-grasp actions for 49 equally spaced cylindrical targets, orientated horizontally or vertically. The data is collected from seven able-bodied participants and two transradial amputees who use prosthetic devices. In the case of able-bodied participants, different bracing systems were applied to the arm to immobilise wrist joints and simulate transradial limb loss, leading to compensatory motions. In total, the dataset consists of 2450 reaching trajectories.
ROAG is a motion capture dataset involving arm and torso pose during reach-to-grasp actions for 49 equally spaced cylindrical targets, orientated horizontally or vertically. The data is collected from seven able-bodied participants and two transradial amputees who use prosthetic devices. In the case of able-bodied participants, different bracing systems were applied to the arm to immobilise wrist joints and simulate transradial limb loss, leading to compensatory motions. In total, the dataset consists of 2450 reaching trajectories.
Link: ROAG Dataset
UniTac-NV Dataset
.gif) The UniTac-NV dataset focuses on aligning tactile data from different non-vision-based sensors (Xela uSkin (uSPa 46) and Contactile PapillArray) using Force/Torque (FT) sensor ground truth. The data was collected by pressing tactile sensors against 3D printed objects with specific geometries (square, circular, hexagonal and arbitrary prisms) and materials (PLA, TPU) using a UR5e robotic arm.
The UniTac-NV dataset focuses on aligning tactile data from different non-vision-based sensors (Xela uSkin (uSPa 46) and Contactile PapillArray) using Force/Torque (FT) sensor ground truth. The data was collected by pressing tactile sensors against 3D printed objects with specific geometries (square, circular, hexagonal and arbitrary prisms) and materials (PLA, TPU) using a UR5e robotic arm.
Link: UniTac-NV Dataset