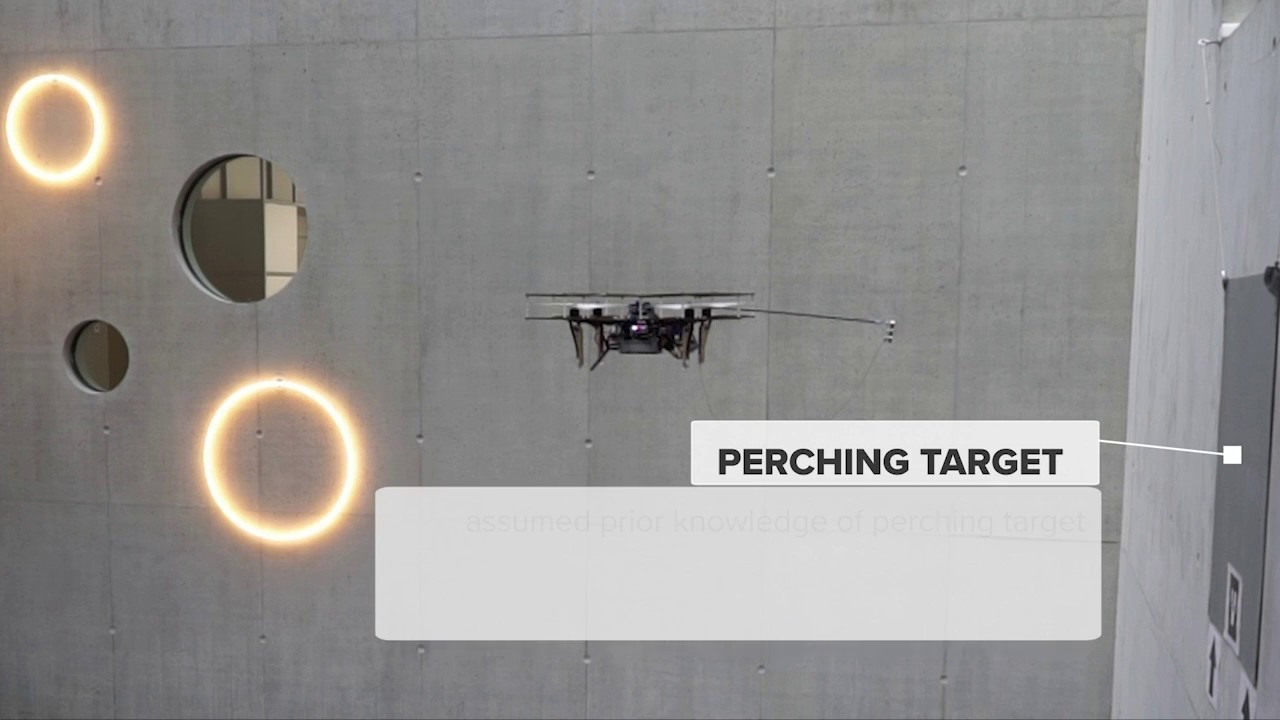
Aerial inspection at close proximity
An autonomous quadrotor system equipped with a winch-tethered magnet that is capable of perching on and sliding along a vertical surface for inspection at close proximity. The first realization of a tethered quadrotor that can hover and perch vertically near infrastructure elements, enabling a variety of surface manipulation and repair tasks.
Media
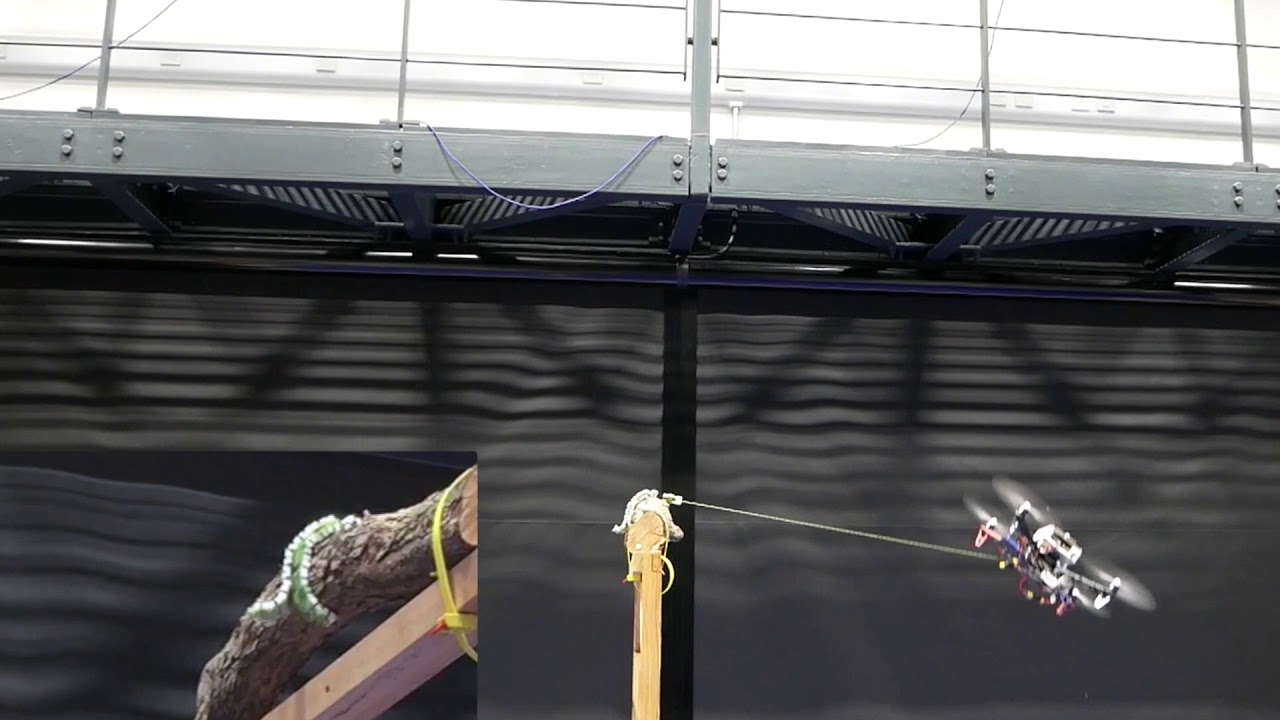
Adaptive tensile perching
An autonomous quadrotor system equipped with a passively adaptive perching mechanism which allows an aerial vehicle to stably attach to a variety of surfaces including tree branches and pipelines. A hybrid force-motion controller is developed to ensure the cable tension to be regulated as the vehicle achieves the desired attitude. The hybrid control approach exploits the mechanical compliance of the system to ensure reliable, stable attachment to irregular natural structures, and the addition of a winch allows the robot to stably orient itself in any position or orientation relative to the branch.
Media
Lead Researchers
Contact us
Prof. Mirko Kovac
Department of Aeronautics
Office hours Thursday 2-3pm
Email: m.kovac@imperial.ac.uk
Tel: +44 (0)207 594 5063
Twitter
@AerialRobotics
@MKovacRobotics
See Our location (Google maps)
See South Kensington Campus map