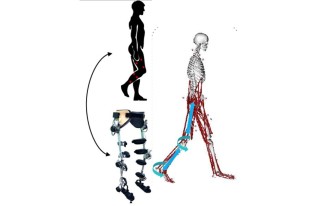
 The research activities undertaken by Neuromechanics and Rehabilitation Technology group range from basic motor neuroscience to applications of the new knowledge acquired from basic studies into the design of neurotechnologies for motor rehabilitation. One of the main applied fields of our investigations is the development of human-machine interfaces for bionic limbs and exoskeletons.
The research activities undertaken by Neuromechanics and Rehabilitation Technology group range from basic motor neuroscience to applications of the new knowledge acquired from basic studies into the design of neurotechnologies for motor rehabilitation. One of the main applied fields of our investigations is the development of human-machine interfaces for bionic limbs and exoskeletons.
Our research primarily focuses on spinal motor neurons which are part of a very complex chain of processes in the neuromuscular system that is responsible for execution of movements. These movements are coded by the occurrence of discrete electrical events (i.e. action potentials) which are generated by the cells of neuromuscular system (i.e. neurons and muscle fibers). Spinal motor neurons are the final processing stage of the neural information as they directly send commands to muscle fibers for movement execution. Therefore, one of our main research areas is deciphering the activity of spinal motor neurons which provide an invaluable opportunity to understand fundamentals of movement generation physiology and pathology.
Within this context, our active research projects involves developing new signal processing methods, new electrodes, and hardware tools for observing the activity of motor neurons reliably. These form the basis of core neural interface platform technologies that are being developed in our group. Our research also focuses on developing advanced signal processing and control methods for advanced prosthetic limbs, exploiting the core neural-interface technologies we are developing. Advanced upper-limb prosthesis, lower-limb exoskeletons, and devices for tremor suppression are a few such examples.
Research topics
- Bionic Reconstruction
- Biosignal processing
- Neural Interfacing
- Neuromodulation
- Neuromuscular Physiology
- Restoration and Augmentation
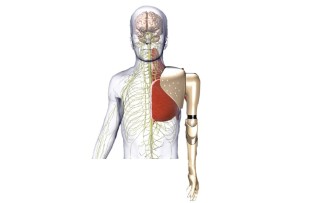
Our research group, in collaboration with Prof. Oskar C. Aszmann in University of Vienna, are exploring ways in improving the performance of prosthetic hand use by synergistically combining medical and engineering approaches. We have shown in the past that by combining selective nerve and muscle transfers, elective amputation, and advanced signal processing, bionic reconstruction offers a means to restore hand function even in cases where there is no alterative treatment.
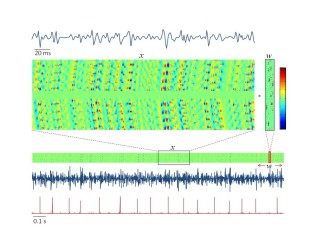
Developing new signal processing methods to decipher the activity of spinal motor neurons, which constitute the ultimate neural code for movement execution, form the core of our research activities. These advanced signal processing methods, known as EMG decomposition, provide invaluable insights into fundamentals of movement generation physiology and pathology. Coupled with high-density electrode technology to exploit the information on spatial variability of the detected motor unit action potentials, we have developed novel blind source separation algorithms that extract the discharge patterns of spinal motor neurons from EMG recordings.
At the core of every human-machine interface lies the neural interface through which the activity of the nervous system is observed (i.e. recorded) and modulated (i.e. stimulated). Our researches are developing state-of-the-art neural interface technologies.
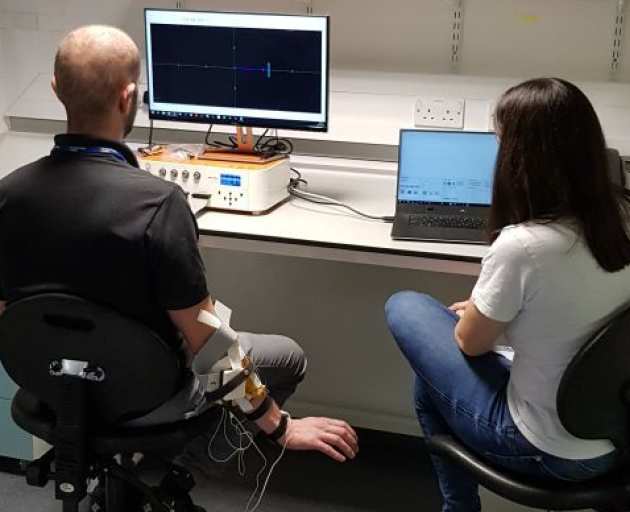
Developed advanced signal processing techniques have recently been translated into a real-time EMG decomposition hardware serving as a non-invasive neural gateway. This device, utilising surface EMG signals recorded on the skin, provides an opportunity to observe the activity of motor neurons in spinal cord in real-time. Closed-loop bio-feedback experiments, prosthetics and neurorehabilitation devices, and control of everyday electronic items are among many applications of the developed platform technology.
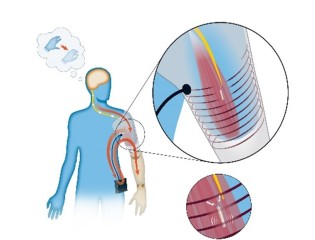
Our team has also successfully designed, produced and tested a novel multi-channel intramuscular wire electrode that allows in vivo concurrent recordings of a substantially greater number of motor units than conventional methods.
In addition to observing (i.e. recording) the neural activity from spinal cord, our research also focuses on modulation of neural activity (i.e. stimulation). This neuromodulation is essential in providing natural sensations for prosthetic users, as well as managing several neurological diseases such as tremor management in essential tremor and Parkinson disease.
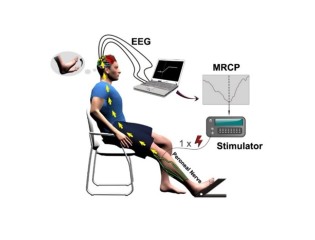
We are currently developing various methods and neuroprosthetic devices for monitoring and suppression of pathological tremors through neuro-stimulation of the afferent pathways.
The central nervous system controls muscle force by modulating the recruitment and discharge rate of motor units. The motor unit is therefore the functional quantum of all muscle actions. In our research, we identify the activity of populations of motor units during voluntary force contractions by high density EMG recordings. By using these techniques, we aim to unravel the underlying mechanisms used by the central nervous system to control multiple degrees of freedom. Moreover, with these techniques we associate the neural properties (e.g., motor unit recruitment, discharge timings of the motor neuron) to peripheral motor unit characteristics (e.g., muscle fibre conduction velocity).