Patterning Precision with Floating Magnetic Microrobots
A new, more precise system for creating miniature medical micro-tools that may someday be used in minimally invasive surgery.
To help meet the growing demand for miniature tools like micro-catheters and micro-tweezers, scientists at the Hamlyn Centre led by Professor Guang-Zhong Yang have devised a new, more precise system for creating micro-tools that may be used in minimally invasive surgery. Their most recent paper on “Floating magnetic micro-robots for fiber functionalization” is published in the latest issue of Science Robotics this week.
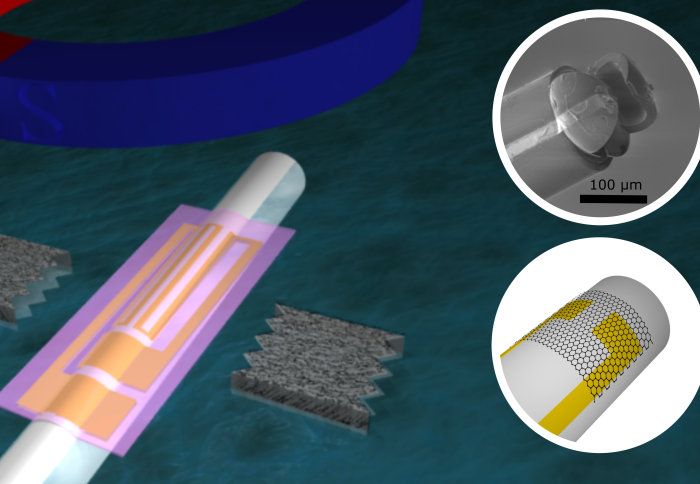
Their simple approach uses a pair of magnetic micro-robots that can grasp and release 2D sheets of micro-electronic circuitry and orient them onto complex 3D fibres – addressing a lack of precision that has previously hindered attempts to build fibre-based robotic tools. While the use of flexible fibres equips micro-tools with the ability to image, sense and handle tiny objects, these tools require other tiny parts like sensors or micro-grippers to function fully, and such additions remain a challenge to implement at a microscopic scale.
To this end, the team developed two 2 millimetre–by–3 millimetre, 200-micrometer-thick micro-robots to align floating electronic circuits on a fibre during a wet transfer process. The position and orientation of the micro-robots were controlled at the air/water interface by a permanent magnet. The stiffness of the position controlled was 0.2 newton millimetre, leading to an average force of 0.5 newton. The non-homogeneous magnetic field of the magnet, associated with different preferred magnetisation directions recorded in the micro-robots, allowed the distance between the two micro-robots to be precisely controlled. This extra degree of freedom was used to control the micro-robot pair as a tweezer to grab and release floating electronic patterns, whereas the others were used to align the pattern position and orientation with the fibre.
The study is supported by the EPSRC Programme Grant on Microrobotics for Surgery, which aims to harness different strands of engineering and clinical developments in micro-robotics for precision surgery and to establish platform technologies for endoluminal micro-surgical intervention with broad values across different surgical specialties. The work is an integral part of developing the “fibre-bot” pioneered by the team, with integrated actuation, sensing and delivery channels for endoluminal micro-surgical tasks.
This research paper can be accessed via Science Robotics official website.

Article supporters
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Erh-Ya (Asa) Tsui
Enterprise