Versatile Robotic Platform for Fluoroscopy &MRI-Guided Endovascular Intervention
The Hamlyn Centre research team developed a versatile robotic platform for fluoroscopy and MRI-guided endovascular interventions.
Cardiovascular diseases (CVDs) remain as the most common cause of death worldwide. CVDs are disorders and diseases affecting the heart or blood vessels, which lead to heart attacks and strokes. However, with the combined efforts of surgeons, radiologists, cardiologists, physicists and engineers, endovascular interventions have become a mainstay of treatment for vascular diseases.
These minimally invasive and image-guided treatments are performed by manipulating thin and flexible instruments (catheters and guidewires) to targeted blood vessels combined with different treatment options including stenting, embolization and ablation.
Recently, there has been a growing interest in robotic platforms that can perform the tasks mentioned above. Remotely manipulated robotic systems are utilized to perform minimally invasive endovascular interventions. Compared to manual interventions, these systems can improve precision, stability, and comfort, eliminating physiological tremor and reducing radiation exposure both for patients and operators.
A versatile robotic platform for fluoroscopy & MRI-guided endovascular intervention
 Our research team at the Hamlyn Centre developed a versatile robotic platform for fluoroscopy and MRI-guided endovascular interventions. The main benefits of this methodology include reduced recovery time, improvement of clinical skills and procedural facilitation.
Our research team at the Hamlyn Centre developed a versatile robotic platform for fluoroscopy and MRI-guided endovascular interventions. The main benefits of this methodology include reduced recovery time, improvement of clinical skills and procedural facilitation.
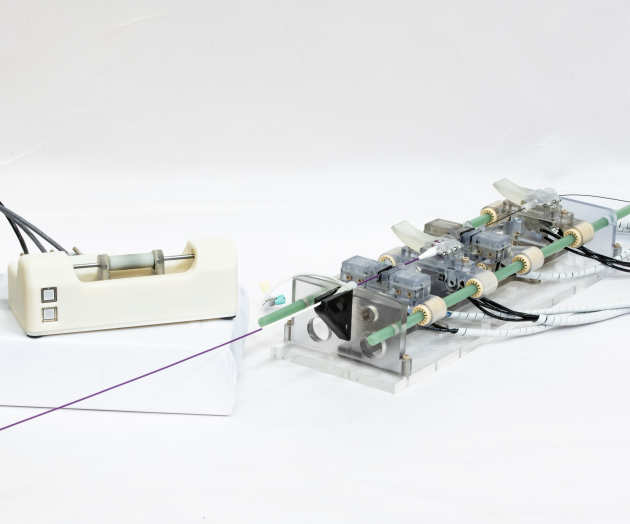
Currently, robotic assistance, precision, and stability of instrument manipulation are compensated by the lack of haptic feedback and an excessive amount of radiation to the patient. Our team proposes this novel master-slave robotic platform that aims to bring the haptic feedback benefit on the master side, providing an intuitive user interface, and clinical familiar workflow. The slave robot is capable of manipulating conventional catheters and guidewires in multi-modal imaging environments.
The system has been initially tested in a phantom cannulation study under fluoroscopic guidance, evaluating its reliability and procedural protocol. As the slave robot has been entirely produced by additive manufacturing and using pneumatic actuation, MR compatibility is enabled and was evaluated in a preliminary study. Results of both studies strongly support the applicability of the robot in different imaging environments and prospective clinical translation.
This novel technology not only won the Best Design Award in the Surgical Robot Challenge 2019 (was held during the Hamlyn Symposium 2019) but also published in IROS 2019 International Conference. Moreover, it has been selected by the Society for Cardiac Robotic Navigation (SCRN) as one of the top three experimental papers during the 2019-2020 period.

This research was supported by EPSRC “Robot Assisted Endovascular Intervention: Device Design and Innovation (EP/N024877/1)" Grant (M. E. M. K. Abdelaziz, D. Kundrat, M. Pupillo, G. Dagnino, T. M. Y. Kwok, W. Chi, V. Groenhuis, F. J. Siepel, C. Riga, S. Stramigioli, G.Z. Yang, “Toward a Versatile Robotic Platform for Fluoroscopy and MRI-Guided Endovascular Interventions: A Pre-Clinical Study”, in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)).
Article supporters
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Erh-Ya (Asa) Tsui
Enterprise