Laser-Profiled Continuum Robot with Integrated Tension Sensing
The Hamlyn Centre researchers proposed a laser-profiled continuum robot with integrated tension sensing for simultaneous shape & tip force estimation.
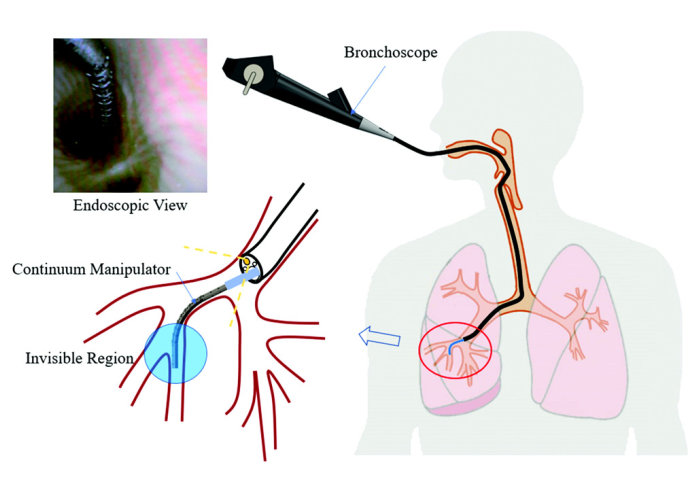
Lung cancer is one of the most common causes of cancer death worldwide. Endobronchial optical biopsy with probe-based confocal laser endomicroscopy (pCLE) is an emerging diagnostic technique for endoluminal diagnosis and intervention.
During intervention, an imaging probe is inserted into the airways to take microscopic images for analysis, thus allowing optical biopsy and providing instant feedback and oncological margin assessment.
However, the imaging probe does not have the capability to steer itself to different airway branches, and standard bronchoscopes are too big to access small peripheral airways.
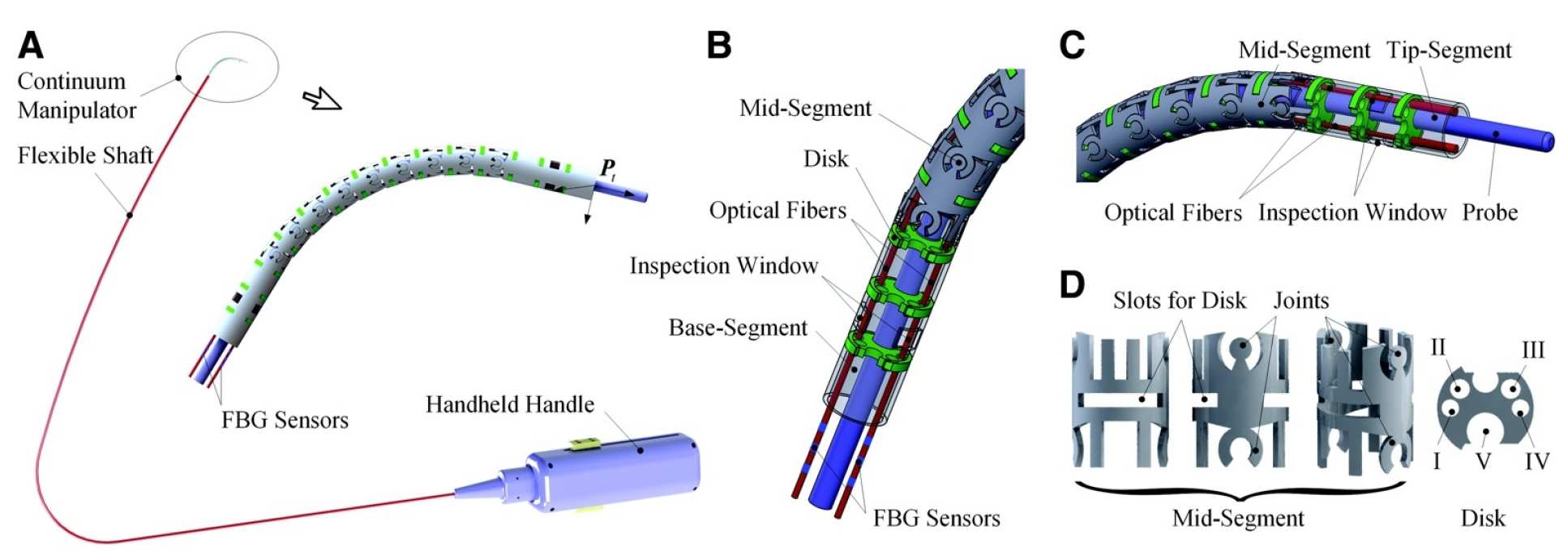
To enable tissue scanning at distal airways, a cable-driven continuum robot with multiple lumens has been developed, where the robot consists of a bendable continuum manipulator and a long flexible shaft.
To navigate inside tortuous lumens without impinging on the vessel wall and causing tissue damage or the risk of perforation, it is necessary to have simultaneous shape sensing of the continuum robot and its tip contact force sensing with the surrounding environment. Miniaturisation and size constraint of the device have precluded the use of conventional sensing hardware and embodiment schemes.
A laser-profiled continuum robot with integrated tension sensing for simultaneous shape and tip force estimation
Our research team at the Hamlyn Centre proposed the use of optical fibres for both actuation and tension/shape/force sensing.
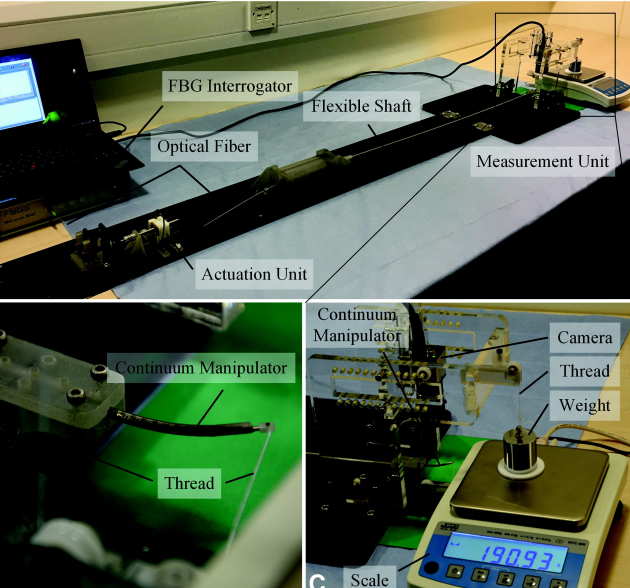
It uses a model-based method with structural compensation, allowing direct measurement of the cable tension near the base of the manipulator without increasing the dimensions. It further structurally filters out disturbances from the flexible shaft.
 In addition, a model is built by considering segment differences, cable interactions/cross talks, and external forces.
In addition, a model is built by considering segment differences, cable interactions/cross talks, and external forces.
The proposed model-based method can simultaneously estimate the shape of the manipulator and external force applied onto the robot tip.
Detailed modelling and validation results demonstrate the accuracy and reliability of the proposed method for the miniaturised continuum robot for endoluminal intervention.
In conclusion, this study has presented an effective compensation method based on tension-sensing cables to actuate a miniaturized laser-profiled continuum manipulator, which can structurally filter out the disturbance from the flexible shaft without requiring additional space.
This research was supported by EPSRC Programme Grant “Micro-robotics for Surgery (EP/P012779/1)” and was published in Soft Robotics on 3 August 2020 [Online Ahead of Print on 20 February 2020] (Anzhu Gao, Ning Liu, Mali Shen, Mohamed E.M.K. Abdelaziz, Burak Temelkuran, and Guang-Zhong Yang, "Laser-Profiled Continuum Robot with Integrated Tension Sensing for Simultaneous Shape and Tip Force Estimation", Soft Robotics 2020).
Article supporters
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Erh-Ya (Asa) Tsui
Enterprise