A New Kinematic Model for A Surgical Robot Tool in Minimally Invasive Surgery

Our Hamlyn researchers proposed a new adaptive kinematic model for a surgical robot tool (Micro-IGES), aiming to aid minimally invasive surgery.
Accurate kinematic models are essential for effective control of surgical robot, in particular minimally invasive surgery, where little (or preferably no) damage should be inflicted on the patient’s body.
One of common surgical robots in minimally invasive surgery is tendon driven robots owing to its capabilities to fulfil the requirements during the operating process, such as miniaturisation requirements, flexibility, and sterilisation.
Yet, the high nonlinearities of tendon driven robots in the transmission make modelling complex. Machine learning techniques are often considered as the preferable approaches to tackle this problem.
However, surgical environments are rarely structured, due to organs being very soft and deformable, and unpredictable. For instance, the situations of wear or break of tendons, or fluids (e.g. blood) in the system, often led to imprecise behaviours of a robotic system.
Therefore, there is a vital need to build a model that can adapt different circumstances quickly.
A New Adaptive Kinematic Modelling for Multi-objective Control of A Surgical Robot Tool (Micro-IGES)
 In light of this, our research team at the Hamlyn Centre proposed a method to learn the kinematic model of a redundant surgical robot and control it to perform surgical tasks both autonomously and in tele-operation.
In light of this, our research team at the Hamlyn Centre proposed a method to learn the kinematic model of a redundant surgical robot and control it to perform surgical tasks both autonomously and in tele-operation.
The approach employed Feedforward Artificial Neural Networks (ANN) for building the kinematic model of the robot offline, and an online adaptive strategy in order to allow the system to conform to the changing environment.
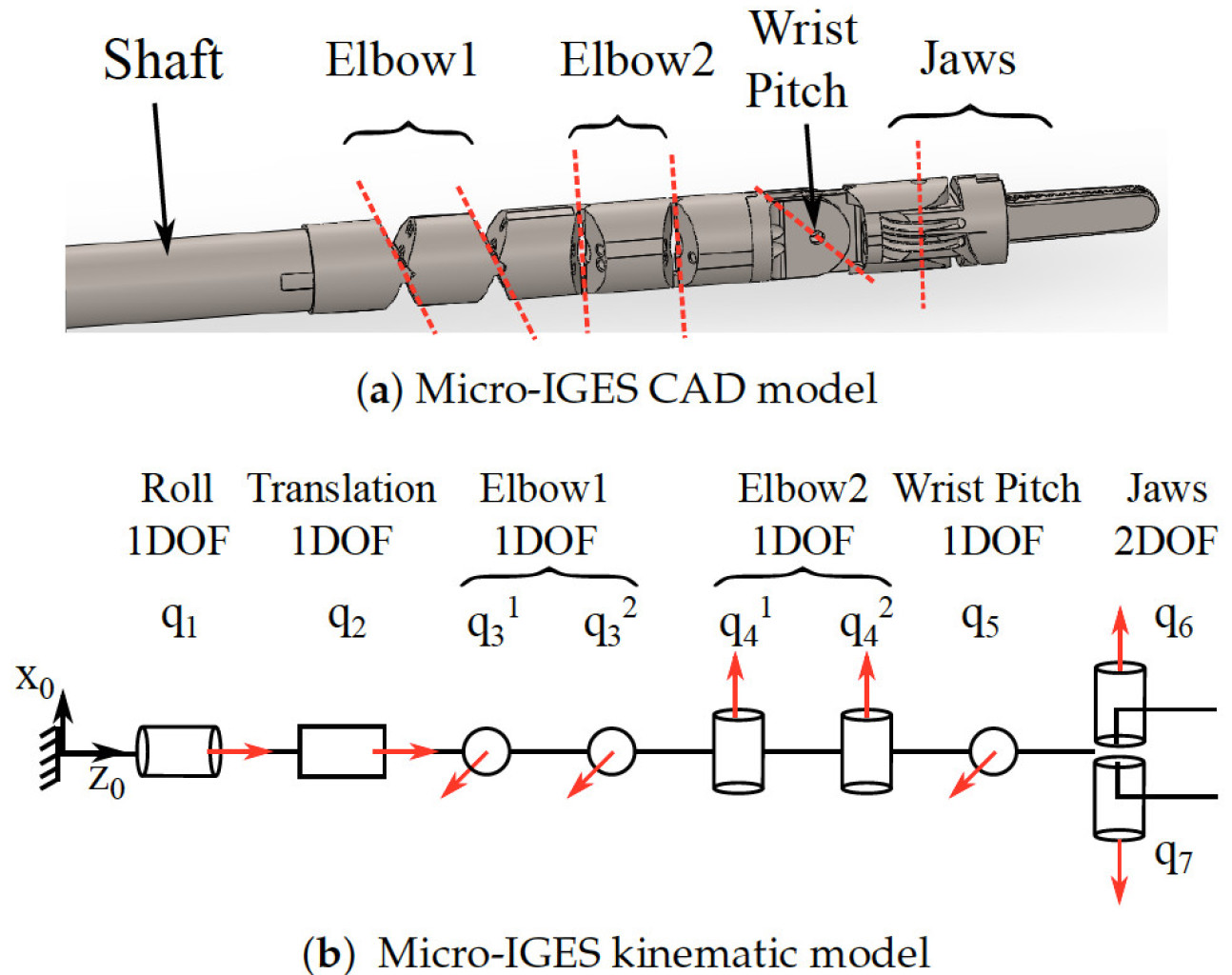
Our researchers performed the approach and adaptive strategy on Micro-IGES (a surgical robotic tool that composed of a rigid shaft and a flexible section, as well as a shaft that provides the roll and translation degrees of freedom (DOFs)).
To prove the capabilities of the method, a comparison with a simple feedback controller for autonomous tracking was carried out.
Simulation results show that the proposed method is capable of achieving very small tracking errors, even when unpredicted changes in the system occur, such as broken joints. The method is also validated as an effective approach when it comes to accurate tracking in tele-operation.
Building on this work, our researchers plan to implement the proposed method on a real surgical robotic tool, where the nonlinear effects of the tendon-driven transmission are difficult to model and highly unpredictable.

This research was supported by EPSRC Programme Grant “Micro-robotics for Surgery (EP/P012779/1)” (Francesco Cursi, George P. Mylonas and Petar Kormushev, "Adaptive Kinematic Modelling for Multiobjective Control of a Redundant Surgical Robotic Tool", Robotics, 9 (3), 68, August 2020).
Article supporters
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Erh-Ya (Asa) Tsui
Enterprise