A Novel MR-Safe Endovascular Robotic Platform for Minimally Invasive Surgery
A Hamlyn-led project proposed a novel MR-Safe endovascular robotic platform, aiming to assist minimally invasive diagnosis, therapy and surgery.
Cardiovascular diseases (CVD) are the most common cause of global death. According to recent surveys, CVD are the most common cause of death worldwide with 17.9 million deaths each year.
Endovascular interventions, in combination with advanced imaging technologies, are promising approaches for CVD minimally invasive diagnosis and therapy.
In recent years, extensive clinical interests in robotic assistance have been growing for endovascular procedures as this approach may shorten patient recovery and hospitalisation times owing to less interventional trauma
More recently, tele-operated robotic platforms target improved manipulation accuracy, stabilisation of instruments in the vasculature, and reduction of patient recovery times.
However, benefits of recent platforms are undermined by a lack of haptics and residual patient exposure to ionising radiation.
A Novel MR-Safe Endovascular Robotic Platform
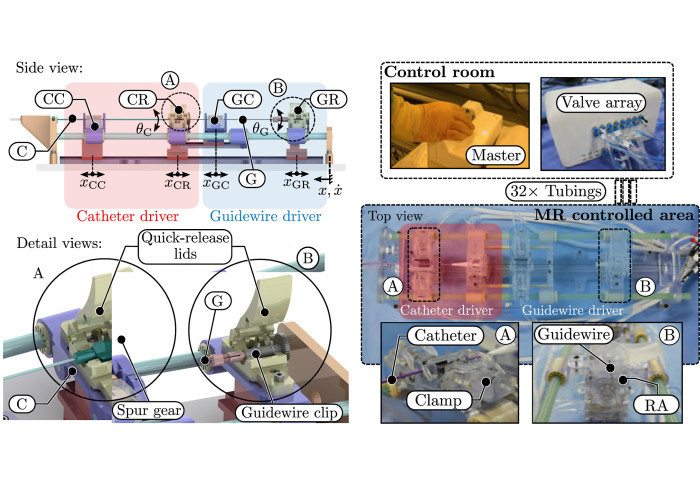
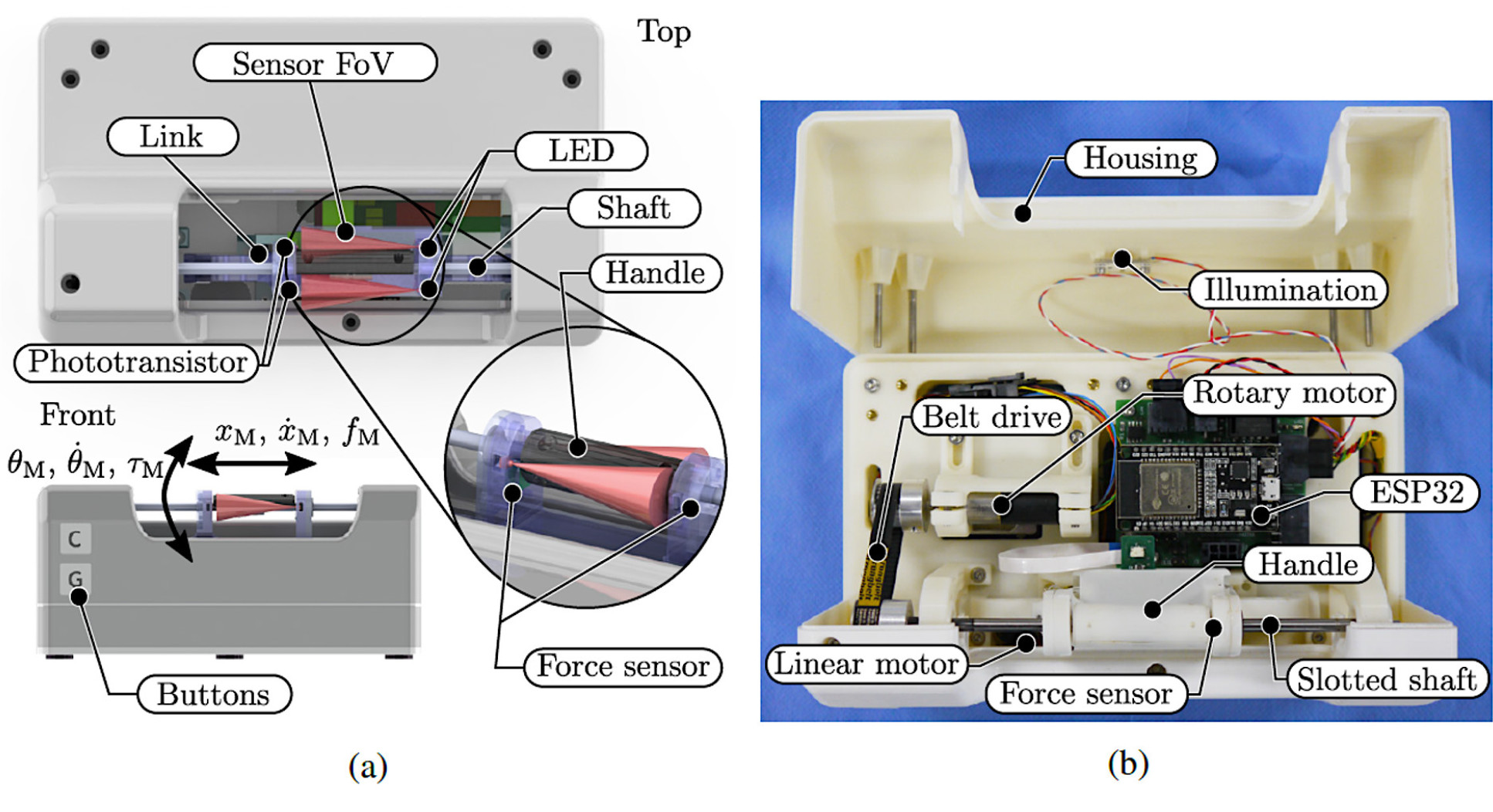
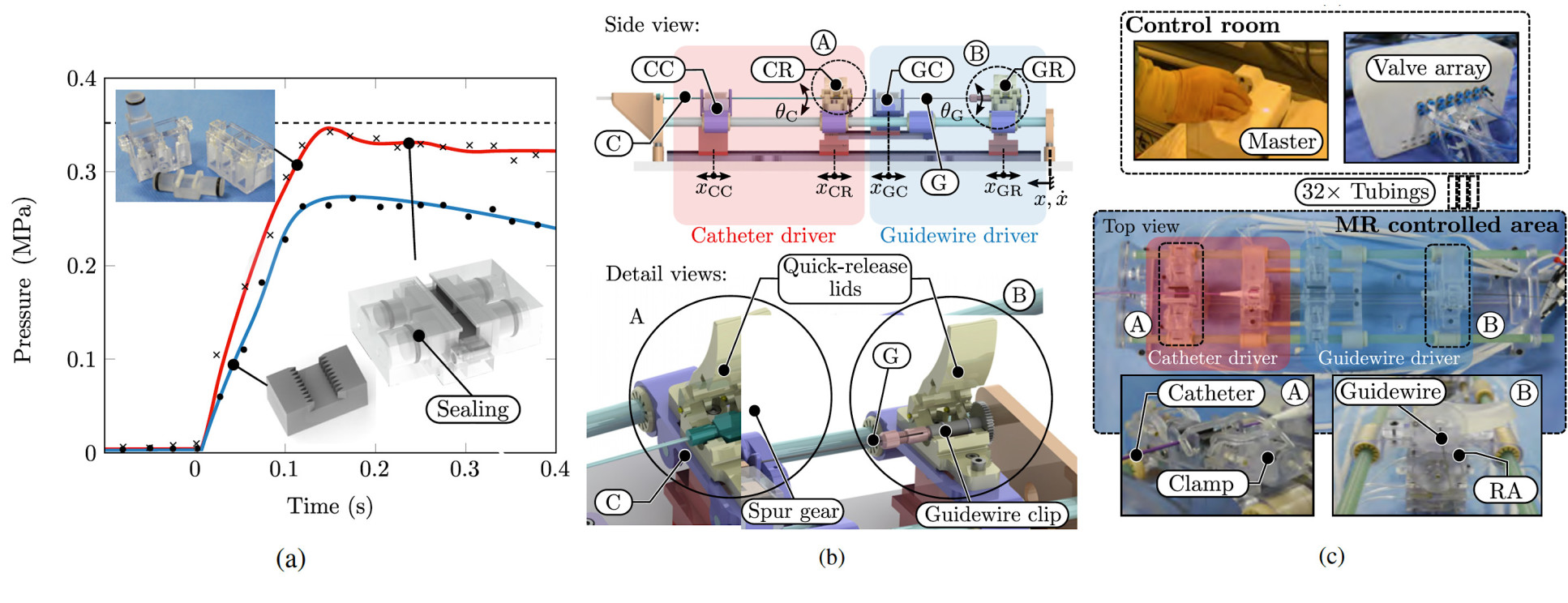
In the light of this, a Hamlyn-led project proposed a novel pneumatically actuated MR-Safe endovascular robotic platform to manipulate endovascular instrumentation remotely and to provide operators with haptic feedback for endovascular tasks.
Our research team at the Hamlyn Centre designs, implements, and evaluates this novel teleoperation endovascular robotic platform, which accommodates emerging non-ionising magnetic resonance imaging (MRI).
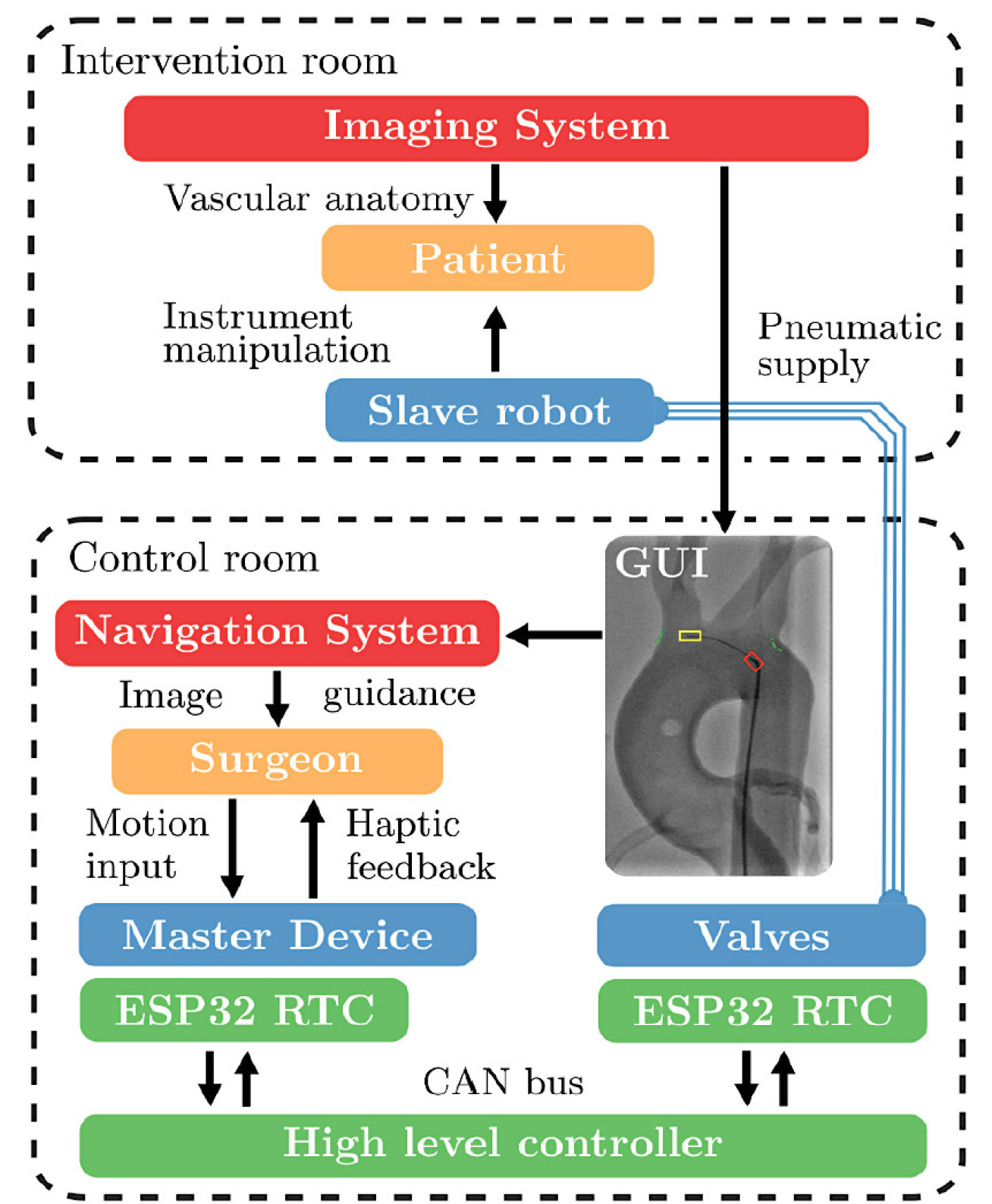
This versatile robotic framework allows the surgeon in the control room tele-operates the MR-safe slave robot deployed in the intervention room with the master device. The navigation system provides real-time visual guidance and haptic feedback is rendered through the master device to guide the surgeon during the procedure.
In this study, our researchers demonstrated that the robotic dexterity involving pneumatic actuation concepts enabled successful remote cannulation of different vascular anatomies with success rates of 90% - 100%. The platform task performance was evaluated in an ex-vivo cannulation study with clinical experts (N = 7) under fluoroscopic guidance and haptic assistance on abdominal and thoracic phantoms.
Moreover, compared to manual cannulation, slightly lower interaction forces between instrumentation and phantoms were measured for specific tasks (the maximum robotic interaction forces did not exceed 3N).
In conclusion, this research not only demonstrates a promising versatile robotic technology for remote manipulation of endovascular instrumentation in MR environments, but also pave the way for clinical translation with device deployment to endovascular interventions using non-ionising real-time 3D MR guidance.
Our research team is planning to further carry out the following tasks in the near future:
- Automation of procedural subtasks, e.g. retraction or branch cannulation, for augmentation and enhancement of operator skills as presented in our prior work.
- Device integration to state-of-the-art MRI suites and fusion with 2D/3D navigation.
- Incorporation of tailored and dexterous MR-safe steerable catheters and wires, as well as user studies in MR environments.
This research was supported by EPSRC “Robot Assisted Endovascular Intervention: Device Design and Innovation (EP/N024877/1)" Grant (Dennis Kundrat; Giulio Dagnino; Trevor M. Y. Kwok; Mohamed E. M. K. Abdelaziz; Wenqiang Chi; Anh Nguyen; C. V. Riga , "An MR-Safe Endovascular Robotic Platform: Design, Control, and Ex-Vivo Evaluation", IEEE Transactions on Biomedical Engineering, March 2021).
Article supporters
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Erh-Ya (Asa) Tsui
Enterprise