DoC researchers receive best paper award at GECCO in Boston

Genetic and Evolutionary Computation Conference (GECCO)
Maxime Allard, Dr. Simón C. Smith, and Dr. Antoine Cully from the Adaptive and Intelligent Robotics Lab have won the best paper award at the Genetic and Evolutionary Computation Conference (GECCO) in Boston, the top international venue for Evolutionary Computation. Every year the conference hosts the world’s top researchers on topics such as artificial life, evolutionary machine learning, evolutionary robotics, and evolutionary multi-objective optimization.
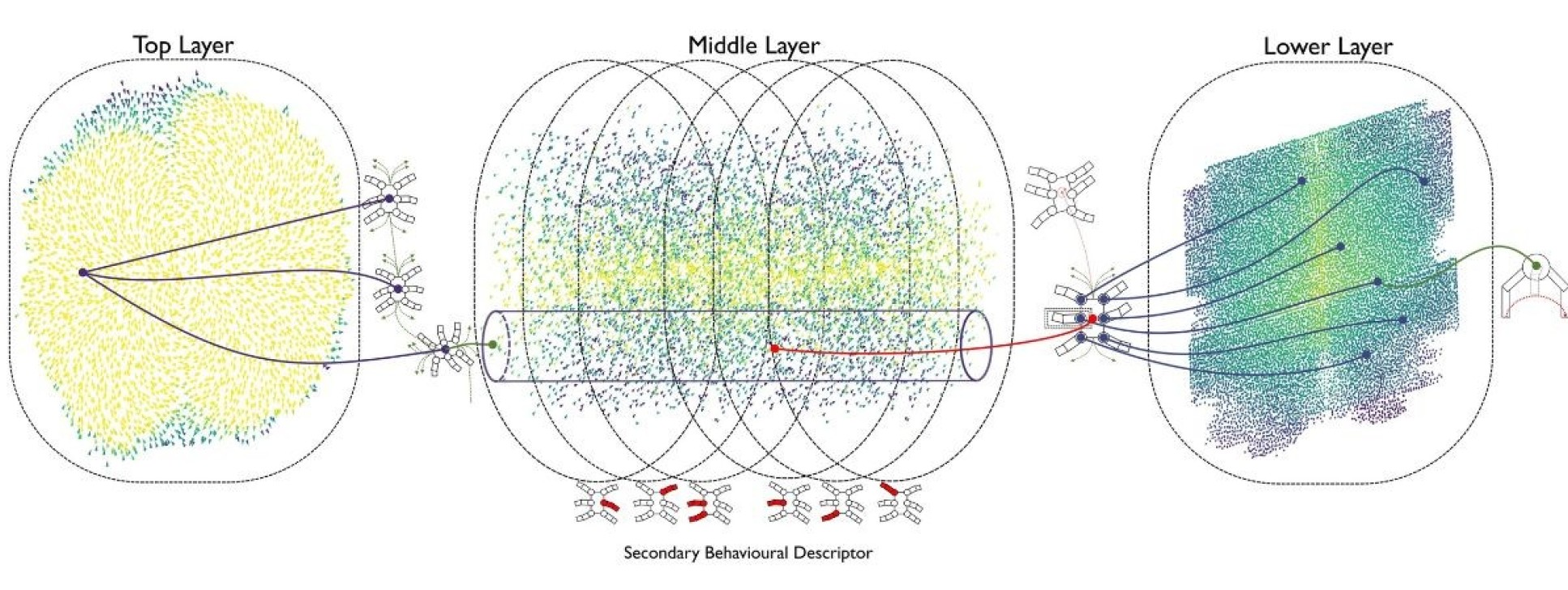
Their work “Hierarchical Quality-Diversity for Online Damage Recovery” was done together with Dr. Konstantinos Chatzilygeroudis from the University of Patras and aims to make robots adapt quickly to damage by learning a diverse set of solutions that are combined hierarchically.
They introduce the Hierarchical Trial and Error algorithm, which uses a hierarchical behavioural repertoire to learn diverse skills and leverages them to make the robot more adaptive to different situations. The hierarchical decomposition of skills enables the robot to learn more complex behaviours while keeping the learning of the repertoire tractable. The experiments with a hexapod robot show that their method solves maze navigation tasks with 20% fewer actions in the most challenging scenarios than the best baseline while having 57% fewer complete failures.
The Adaptive and Intelligent Robotics Lab will continue to investigate hierarchical methods to make robots learn diverse skills that can be used during deployments to make the robots more robust against damage.
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Mr Ahmed Idle
Department of Computing