Research Themes: Robot Manipulation | Robot Design and Control
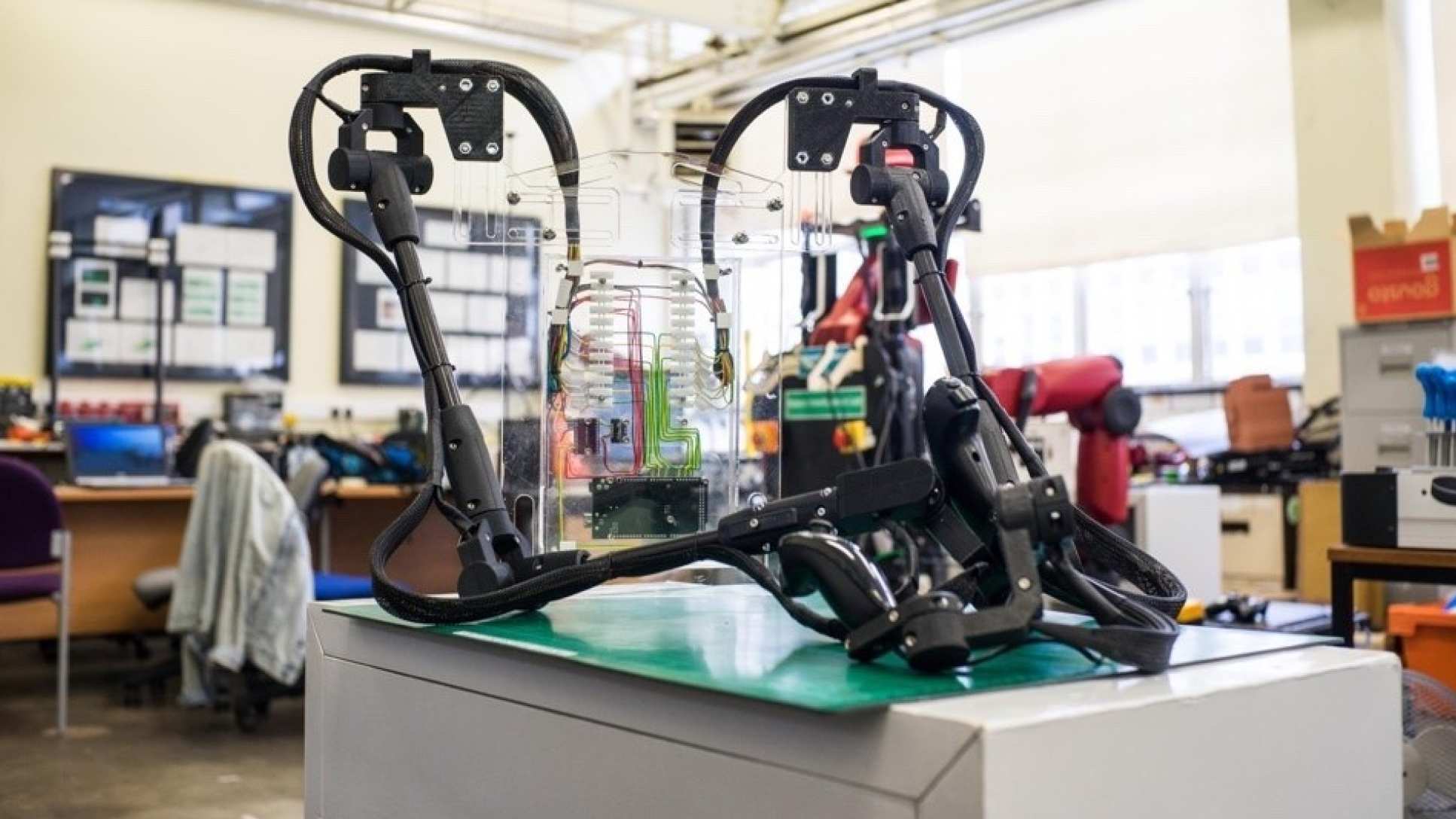
This is our robot tele-operation system called "DE VITO" (Design Engineering's Virtual Interface for Tele-Operation). DE VITO is based on a dual-arm upper-limb exoskeleton with 14 degrees of freedom. The exoskeleton passively measures the pose of a human arm to control a slave robot through teleoperation. DE VITO is designed and built from low-cost and low-power components to be extremely lightweight and portable. It can be used together with a virtual reality headset, hand controllers, and body tracking markers for a fully immersive experience. We have designed and built DE VITO from scratch in our lab, and we use it to teleoperate Robot DE NIRO and other mobile manipulation robots.
This webpage contains the outcomes and supplementary material of our research paper "DE VITO: A Dual-arm, High Degree-of-freedom, Lightweight, Inexpensive, Passive Upper-limb Exoskeleton for Robot Teleoperation", presented at at the 20th Towards Autonomous Robotic Systems Conference (TAROS) 2019 and published in the Springer Lecture Notes in Artificial Intelligence (LNAI) series. The paper received the Best Paper Award at the TAROS 2019 conference. Find PDF of paper here and here.
Publications
- Fabian Falck, Kawin Larppichet, Petar Kormushev, "DE VITO: A Dual-arm, High Degree-of-freedom, Lightweight, Inexpensive, Passive Upper-limb Exoskeleton for Robot Teleoperation", In Proc. 20th International Conference Towards Autonomous Robotic Systems (TAROS 2019), London, UK, 2019. (Best Paper Award)
- Fabian Falck, Sagar Doshi, Marion Tormento, Gor Nersisyan, Nico Smuts, John Lingi, Kim Rants, Roni Permana Saputra, Ke Wang, Petar Kormushev, "Robot DE NIRO: A Human-Centered, Autonomous, Mobile Research Platform for Cognitively-Enhanced Manipulation", In Frontiers in Robotics and AI, 2020.
Supplementary materials
We are happy to open-source our hardware design and software implementation of DE VITO for the benefit of the research community.
- CAD models and documentation: <here>
- Open-source code of kinematic control algorithms: <here>
- Videos of DE VITO on selected manipulation experiments: <here>


See DE VITO in action
June 2019
This is a video summary of the robot demonstrations by the Robot Intelligence Lab at the Great Exhibition Road Festival 2019, presented by the Director of the lab - Dr Petar Kormushev.
The red-hat robot in the video is DE NIRO --- Design Engineering's Natural Interaction Robot --- and is being controlled by the DE VITO Exoskeleton.

Contact us

