Research Themes: Robot Manipulation | Robot Locomotion | Robot Cognition | Robot Design and Control
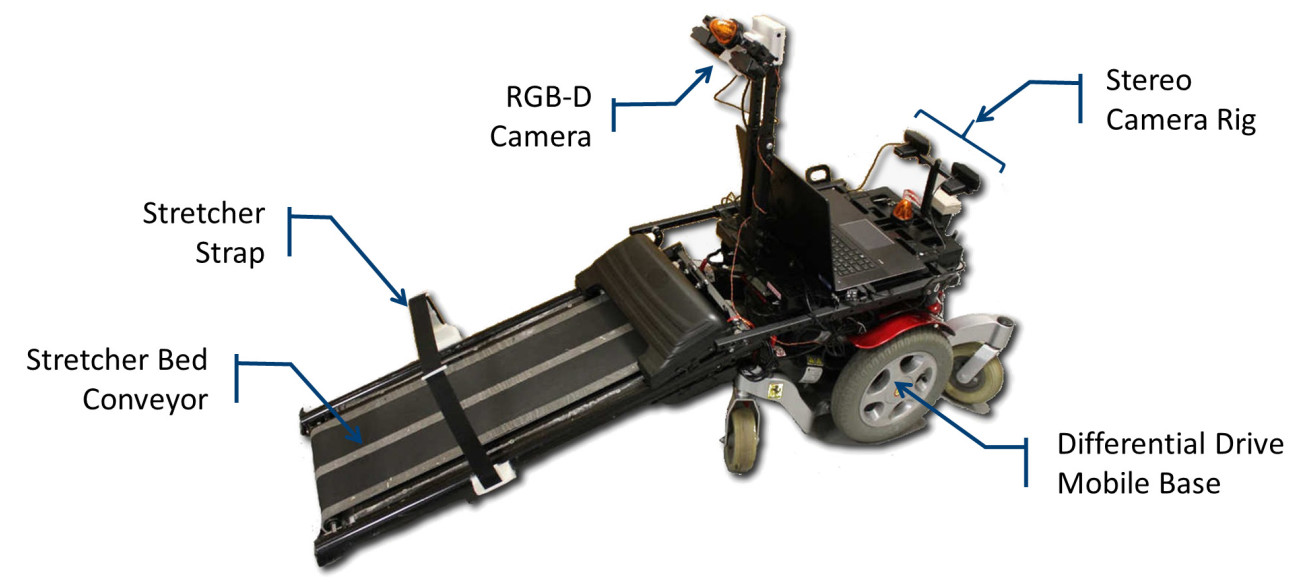
ResQbot is a proof-of-concept mobile rescue robot that has been designed for casualty extraction. This robot is a stretcher type casualty extraction robot platform comprising a motorised stretcher bed conveyor attached to a differential-drive mobile base. This robot is a stretcher-type mobile rescue robot designed to safely load a casualty using the loco-manipulation approach — using combination of the robot’s wheeled locomotion and the active pulling from the belt conveyor mechanism to load a casualty. The loco-manipulation process allows the robot to load the casualty while ensuring key safety thresholds are adhered to and avoids potential causes of additional injury to the casualty, such as head, neck or spinal cord injuries. The stretcher bed conveyor of this robot is also equipped with a stretcher strap mechanism to safely secure the casualty during the transportation. ResQbot is also equipped with perception devices, including an RGB-D camera and stereo camera rigs, that provides the perceptive feedback required during the operation. These perception devices are also designed to further enable ResQbot to perform autonomous casualty detection.
Publications
-
Roni Permana Saputra, Nemanja Rakicevic, Digby Chappell, Ke Wang, Petar Kormushev, "Hierarchical Decomposed-Objective Model Predictive Control for Autonomous Casualty Extraction", In IEEE Access, IEEE, 2021.
- Roni Permana Saputra, Nemanja Rakicevic, Petar Kormushev, "Sim-to-Real Learning for Casualty Detection from Ground Projected Point Cloud Data", In Proc. IEEE/RSJ Intl Conf. on Intelligent Robots and Systems (IROS 2019), Macau, China, 2019.
- Roni Permana Saputra, Petar Kormushev, "Casualty Detection from 3D Point Cloud Data for Autonomous Ground Mobile Rescue Robots", In Proc. 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR 2018), Philadelphia, USA, 2018.
- Roni Permana Saputra, Petar Kormushev, "ResQbot: A Mobile Rescue Robot with Immersive Teleperception for Casualty Extraction", In Proc. 19th International Conference Towards Autonomous Robotic Systems (TAROS 2018), Bristol, UK, 2018.
- Roni Permana Saputra, Petar Kormushev, "Casualty Detection for Mobile Rescue Robots via Ground-Projected Point Clouds", In Proc. 19th International Conference Towards Autonomous Robotic Systems (TAROS 2018), Bristol, UK, 2018.
- Roni Permana Saputra, Petar Kormushev, "ResQbot: A Mobile Rescue Robot for Casualty Extraction", In Proc. 2018 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2018), Chicago, USA, pp. 239-240, 2018.

HiDO-MPC for Autonomous Casualty Extraction
In this paper, we propose a Hierarchical Decomposed-Objective based Model Predictive Control (HiDO-MPC) method for safely approaching and manoeuvring around the casualty. At every time step, the controller evaluates this hierarchical decomposed objective and generates the optimal control decision in order to safely prepare for casualty extraction.


Contact us

