D-PALI
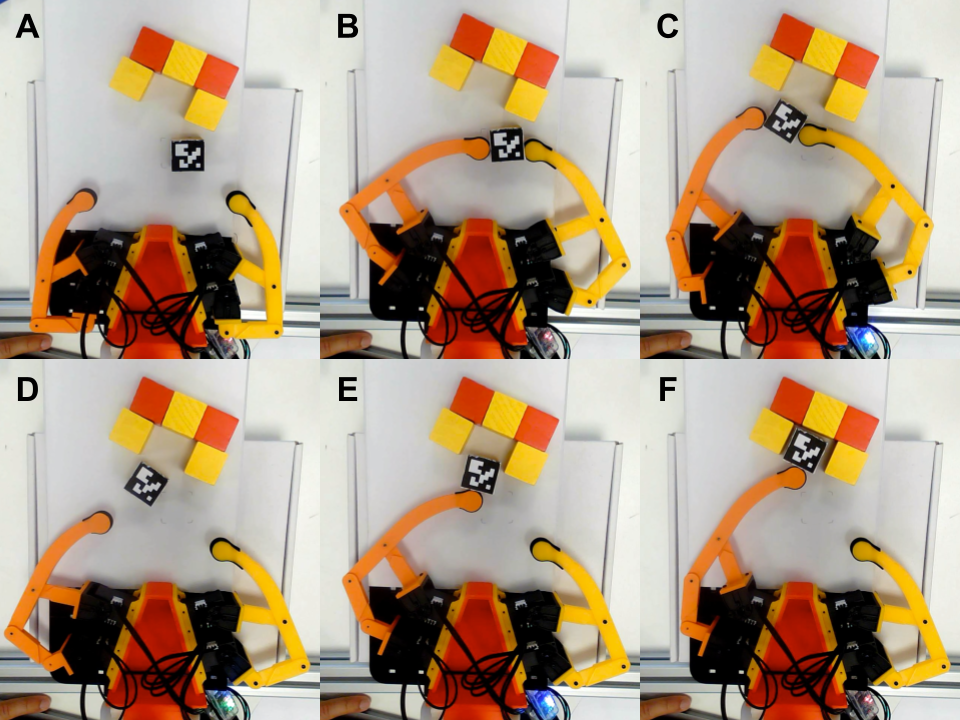
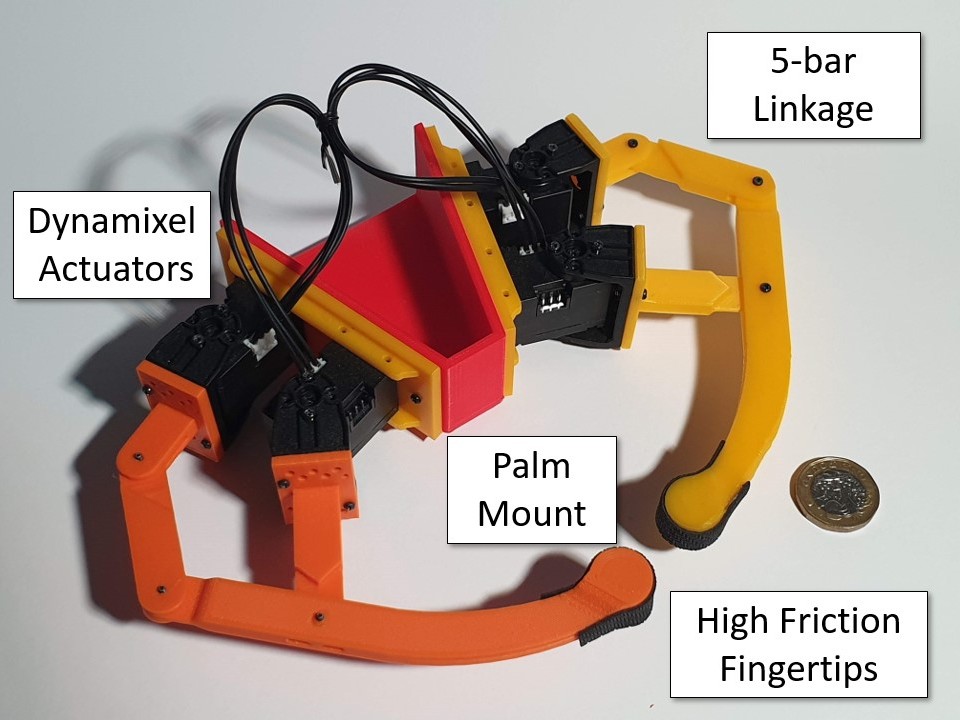
D-PALI stands for Dexterous-PArrallel Linkage. It is a £150 gripper designed as an in-hand manipulation platform. By making use of parrallel mechanisms commonly found in industrial manipulators, we faciliatate the ability to translate and rotate objects within the grasp on the hand.