Realtime response is very important for survival in natural environments. Given that neural pathways are slow to communicate and model based predictive control needs prior experience, we suspect that there are physical mechanisms in the body that can solve computational problems to bring physical dynamics and computing function together. Some clues are in the Cochlea in the ear. It is a tapered tube with liquid inside it. When pressure waves cause the liquid to vibrate, and due to the shape of the tube, different frequency components get separated into known locations along the tube. Then Cochlea hair pick these frequency components to feed the brain. Mapping the pressure signal from its time domain to the frequency domain is a computation purely implemented using the physics of liquid vibration in a tapered tube. This also means that when the viscosity of Cochlea liquid changes, the computing function also changes. Here are some of our publications in this area:
Sara demonstrating goat hoofs with Boston Dynamic CEO, Marc Raibert
- Barry William Mulvey, Thilina Dulantha Lalitharatne, Thrishantha Nanayakkara, "DeforMoBot: A Bio-Inspired Deformable Mobile Robot for Navigation Among Obstacles", IEEE Robotics and Automation Letters (RAL), 2023. [PDF]
- Lucia Seminara, Strahinja Dosen, Fulvio Mastrogiovanni, Matteo Bianchi, Simon Watt, Philipp Beckerle, Thrishantha Nanayakkara, Knut Drewing, Alessandro Moscatelli, Roberta L. Klatzky and Gerald E. Loeb, "A touch of humanity for human-in-the-loop artificial hands", Science Robotics, 2023. [PDF]
- Angelini, F., Angelini, P., Angiolini, C., Bagella, S., Bonomo, F., Caccianiga, M., Della Santina, C., Gigante, D., Hutter, M., Nanayakkara, T. and Remagnino, P., Robotic Monitoring of Habitats: the Natural Intelligence Approach. IEEE Access, 2023. [PDF]
-
Ranjan, Alok, Franco Angelini, Thrishantha Nanayakkara, and Manolo Garabini. "Design Guidelines for Bioinspired Adaptive Foot for Stable Interaction With the Environment." IEEE/ASME Transactions on Mechatronics (2023). [PDF]
- Labazanova, L., Peng, S., Qiu, L., Lee, H. Y., Nanayakkara, T., & Navarro-Alarcon, D. Self-Reconfigurable Soft-Rigid Mobile Agent With Variable Stiffness and Adaptive Morphology. IEEE Robotics and Automation Letters (RAL), 8(3), 1643-1650, 2023. [PDF]
- Yu, Zhenhua, Uswatta Liyanage Shehara Perera, Helmut Hauser, Peter RN Childs, and Thrishantha Nanayakkara. "A Tapered Whisker-Based Physical Reservoir Computing System for Mobile Robot Terrain Identification in Unstructured Environments." IEEE Robotics and Automation Letters (2022). [PDF]
- Ge, Yukun, Thilina Dulantha Lalitharatne, and Thrishantha Nanayakkara. "Origami Inspired Design for Capsule Endoscope to Retrograde Using Intestinal Peristalsis." IEEE Robotics and Automation Letters 7, no. 2 (2022): 5429-5435. [PDF]
- Yu, Zhenhua, SM Hadi Sadati, Helmut Hauser, Peter RN Childs, and Thrishantha Nanayakkara. "A Semi-Supervised Reservoir Computing System Based on Tapered Whisker for Mobile Robot Terrain Identification and Roughness Estimation." IEEE Robotics and Automation Letters 7, no. 2 (2022): 5655-5662. [PDF]
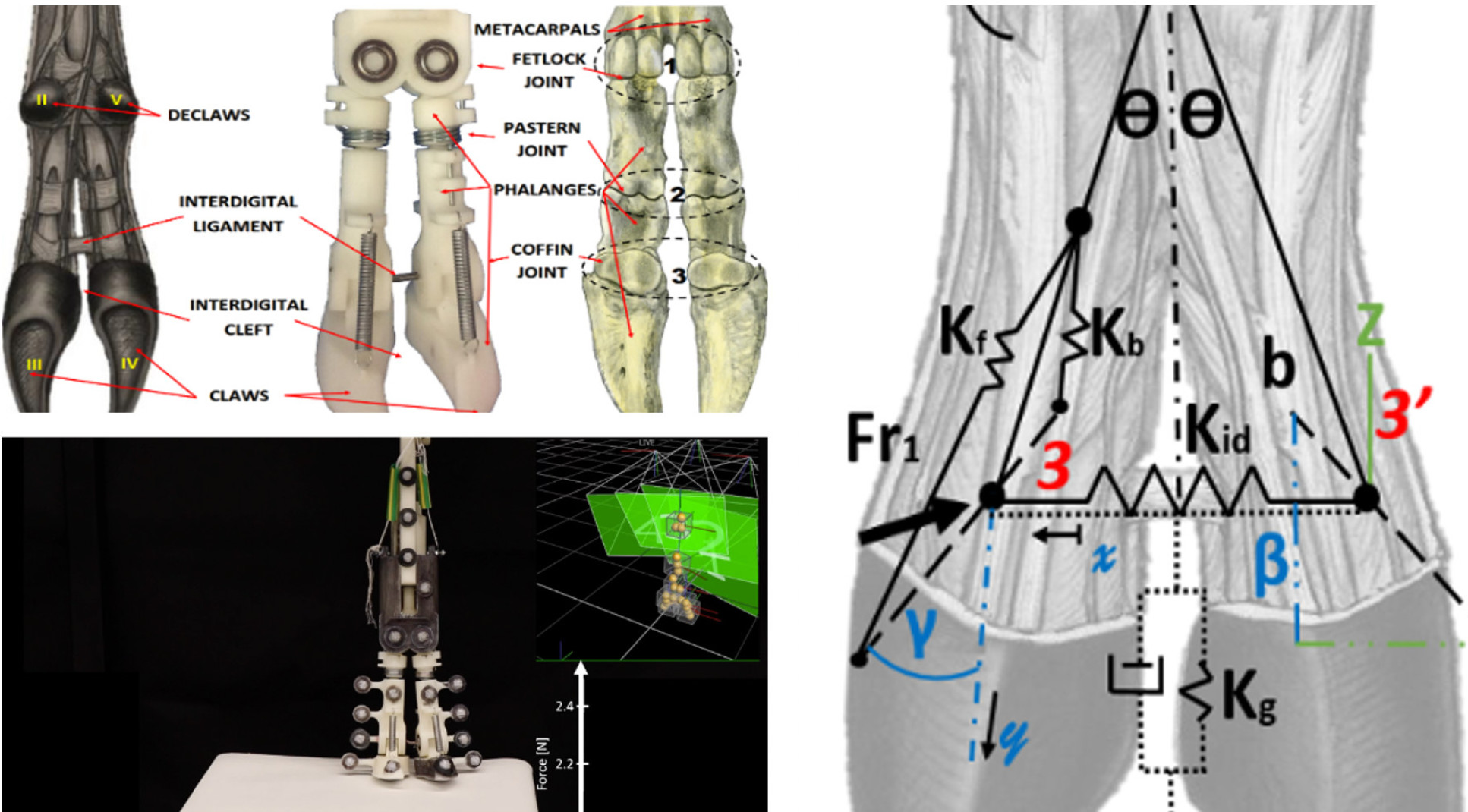
- Abad, S. A., Herzig, N., Sadati, S. M. H., & Nanayakkara, T. (2019). Significance of the Compliance of the Joints on the Dynamic Slip Resistance of a Bioinspired Hoof. IEEE Transactions on Robotics, 35(6), 1450-1463. [PDF] [Video]
- Elham Hamid, Nicolas Herzig, Sara Adela Abad Guaman, Thrishantha Nanayakkara, "A State-Dependent Damping Method to Reduce Collision Force and Its Variability", IEEE Robotics and Automation Letters, 2021 [PDF]
- Sara Adela Abad Guaman, Nicolas Herzig, Hadi Sadati, and Thrishantha Nanayakkara, “Significance of the Compliance of the Joints on the Dynamic Slip Resistance of a Bioinspired Hoof”, IEEE International Conference on Robotics and Automation (ICRA) 2020.
- Sara Adela Abad Guaman, Nantachai Sornkarn, Thrishantha Nanayakkara, “The role of morphological computation of the goat hoof in slip reduction”, 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 5599 – 5605, DOI: 10.1109/IROS.2016.7759823, 2016. PDF
- Akhond, S., Herzig, N., Wegiriya, H., & Nanayakkara, T. (2019). A method to guide local physical adaptations in a robot based on phase portraits. IEEE Access, 7, 78830-78841. PDF
- Maximiliano Francisco Escudero Morland, Kaspar Althoefer, and Thrishantha Nanayakkara, “Novel Method to Form Adaptive Internal Impedance Profiles in Walkers”, 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC-2015), Milano, Italy, pp.7764 – 7767, DOI: 10.1109/EMBC.2015.7320192, 2015. PDF
- Visakha K. Nanayakkara, Nantachai Sornkarn, Hasitha Wegiriya, Nikolaos Vitzilaios, Demetrios Venetsanos, Nicolas Rojas, M. Necip Sahinkaya, Thrishantha Nanayakkara (2019) A Method to Estimate the Oblique Arch Folding Axis for Thumb Assistive Devices. In: Althoefer K., Konstantinova J., Zhang K. (eds) Towards Autonomous Robotic Systems. TAROS 2019. Lecture Notes in Computer Science, vol 11649. Springer, Cham PDF
Contact the PI
Professor Thrishantha Nanayakkara
RCS1 M229, Dyson Building
25 Exhibition Road
South Kensington, SW7 2DB
Email: t.nanayakkara@imperial.ac.uk