Context
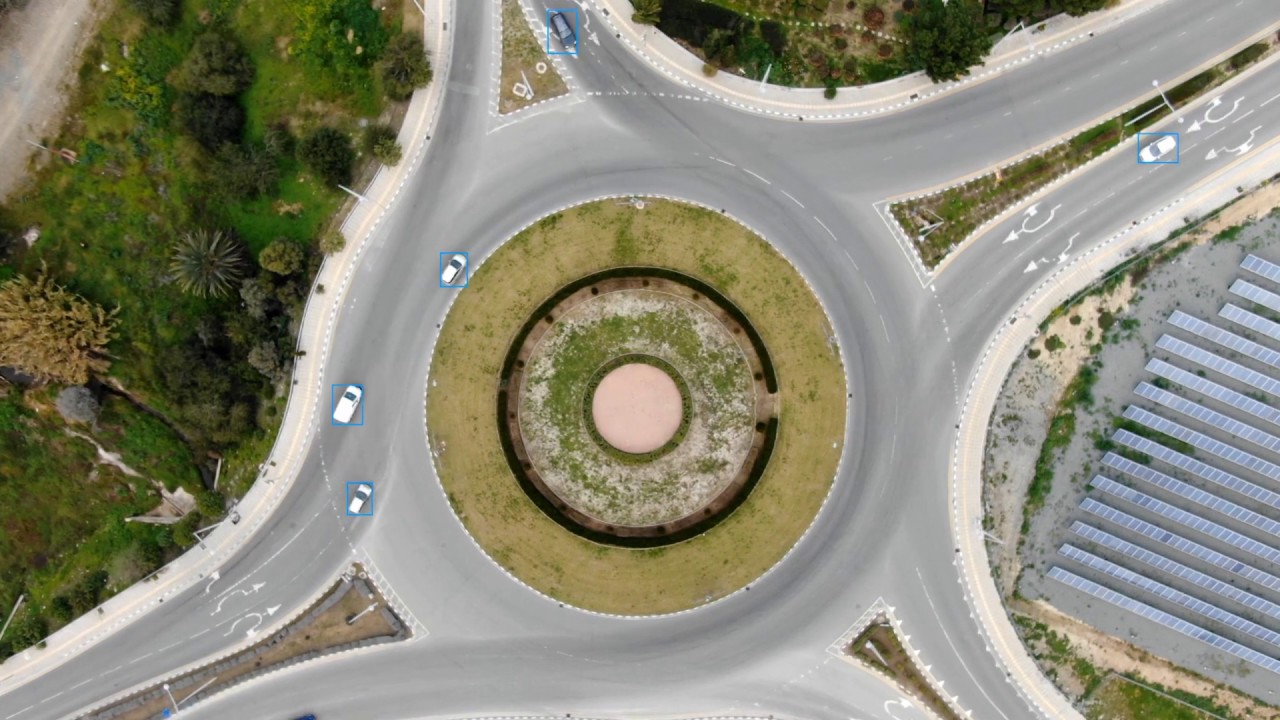
CyCAR is collected through real UAV flights above the city of Nicosia in Cyprus. Overall the dataset features 27 min of high-resolution video, captured by 3 different UAVs with their camera pose being vertical to the ground. Vehicles on a subset of selected frames have been annotated with tight axis-aligned bounding boxes by human experts. The annotated frames span from heavily congested to clear traffic situations. Furthermore, CyCAR videos comprise a wide variety of scenarios including: (i) static UAV above an urban area-of-interest, (ii) moving UAV on a prespecified path and (iii) UAV following a moving "target" vehicle on the ground, in order to facilitate a comprehensive set of traffic monitoring scenarios such as persistent monitoring of an area (e.g. for traffic regulation purposes), periodical data collection (e.g. for extracting statistics) and live traffic density estimation (e.g. for emergency response).
Altitude Annotations
A key differentiating feature of CyCAR compared to other Aerial Detection datasets, is the broad range of UAV flying altitudes during its collection process. With a minimum level of 20m above ground, highly detailed close-distance images of vehicles and their surrounding environments are captured. Simultaneously, the maximum flight-level of 500m above ground provides enormous and challenging ground-area coverage embracing a large number of vehicles and diverse cluttered background in a single frame.
Most importantly, CyCAR frames are altitude-stamped with respect to its take-off point based on discretised flying height estimation acquired by the UAV's on-board sensors.
Video
Dataset
We are preparing to release v2.0 of CyCAR Dataset soon. Stay Tuned!
Citation
Please cite the following paper if you find this dataset useful for your work:
A. Kouris, C. Kyrkou and C.S. Bouganis, Informed Region Selection for Efficient UAV-based Object Detectors: Altitude-aware Vehicle Detection with CyCAR Dataset, in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019 (pdf, BibTex)
License
The CyCAR dataset is made available by the Intelligent Digital Systems Lab (iDSL) at Imperial College London and the KIOS Research and Innovation Center of Excellence at the University of Cyprus, under an Open Data Commons (ODC) Attribution License.





















































