
Morph Lab
Morph Lab
Mechanical intelligence in living beings excite us! It is present literally in every bodily formation. From separation of audio frequencies in the tapered cochlea membrane to stabilizing force fields in joints, it works closely with the brain to solve complex dynamic interaction problems. We hypothesise that the meaning behind brain’s constant attempt to tune the posture and stiffness of joints while executing a task lies in the way mechanical intelligence in physical systems contribute to intelligent behavior.
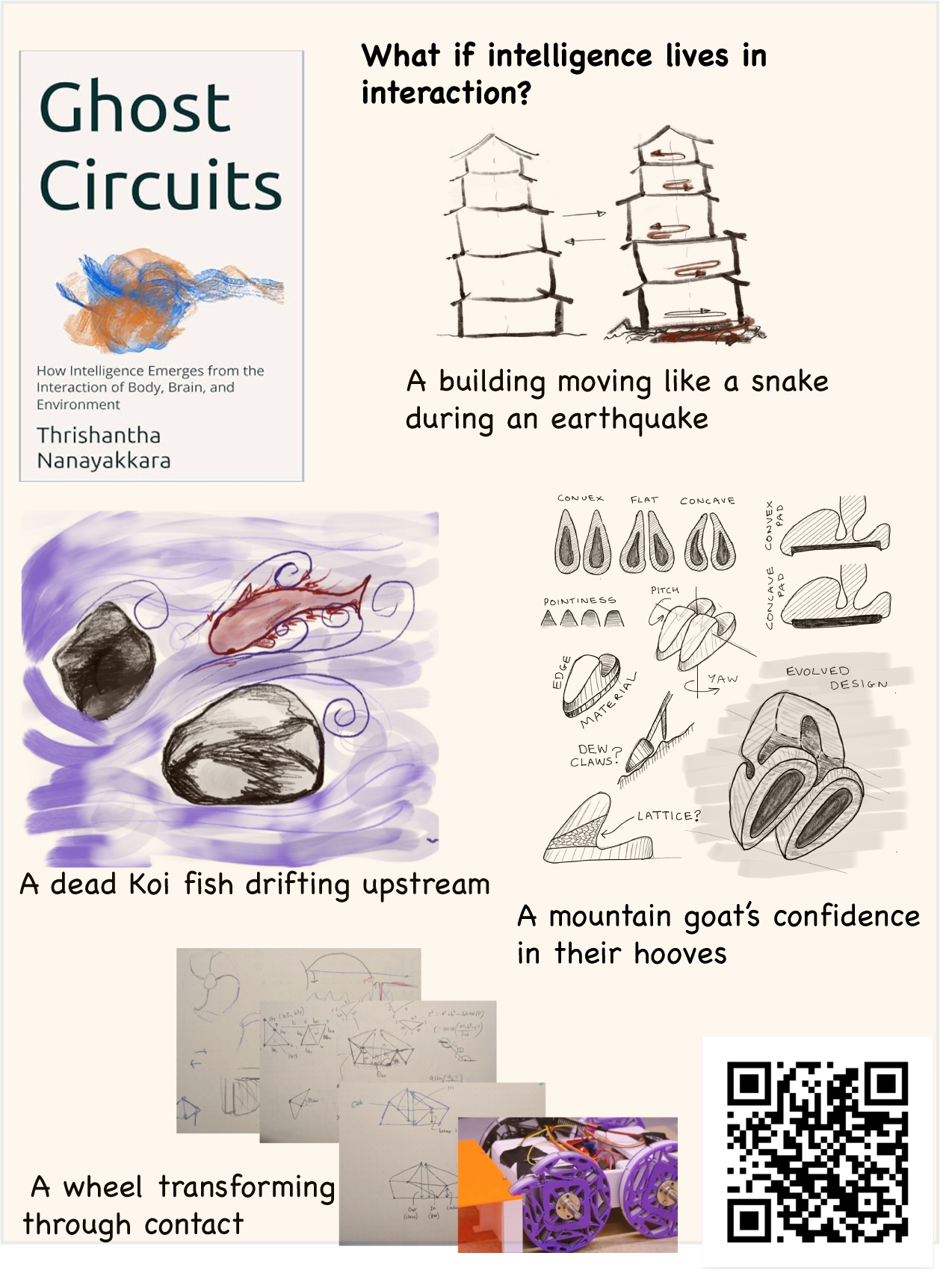
In the Handbook on Soft Robotics, I introduced a term called Ghost Circuits to explain this phenomenon.
"The foundation of embodied intelligence is a ghost circuit of different dynamic systems. Ghost circuits come together when conditions are right and dissolve otherwise. Intelligence is a temporary perception rendered by a ghost circuit while it exists"
In the new book on Ghost Circuits, I took examples from more than 25 years of my research career with more than 20 PhD projects in my lab to further discuss the idea. There I wrote:
"Ghost circuits emerge when formations, poised to solve dynamic problems with each other, meet and interact. They reveal a dormant intelligence that lives in the structure, composition, and flow."
The idea of “softness” plays a crucial role to mediate this smooth signal flow. Embodied “ghost circuits” are everywhere. They come together on their own, continue their dynamic interactions on their own, dissolve on their own, and evolve on their own. The assessment of their “intelligence” remains subjective, contingent upon the intricacies perceived by a conscious observer—a judgment that resists replication in identical form, as the observer becomes an integral part of the circuit.
Employing robotics as our experimental paradigm, we investigate hypotheses to understand the potential of mechanical intelligence in ghost circuits. What distinguishes this methodology is its twofold impact: not only does it lead to useful robotic solutions, but it also deepens our foundational understanding of the natural world.
- Thrishantha Nanayakkara
Follow us on Twitter
More information
 Thrishantha Nanayakkara is Professor of Robotics at Dyson School of Design Engineering (DSDE), Imperial College London, where he is also the Director of the Morph lab. He has published more than 150 papers in flagship robotics conferences and journals including IEEE transactions on robotics, International Journal of Robotics Research, Scientific Reports, IEEE Robotics and Automation Letters, RSS, IROS, ICRA, and RoboSoft. He is a senior editor of the Journal of Robotics Research (IJRR), an Associate Editor of IEEE Robotics and Automation Letters, Scientific Reports, RSS, ICRA, IROS, RoboSoft, and the Journal of Robotics and Mechatronics. He has worked at leading laboratories for robotics and neuromotor control, including the Laboratory for Computational Motor Control, Johns Hopkins University, MIT Computer Science and Artificial Intelligence Lab (CSAIL), and Harvard Neuromotor Control Lab. He is and has been PI on EPSRC and EU funded projects of more than £5 million that have pushed the boundaries of our understanding on how conditioning the body improves the efficacy of action and perception in human-human and human-robot interactions.
Thrishantha Nanayakkara is Professor of Robotics at Dyson School of Design Engineering (DSDE), Imperial College London, where he is also the Director of the Morph lab. He has published more than 150 papers in flagship robotics conferences and journals including IEEE transactions on robotics, International Journal of Robotics Research, Scientific Reports, IEEE Robotics and Automation Letters, RSS, IROS, ICRA, and RoboSoft. He is a senior editor of the Journal of Robotics Research (IJRR), an Associate Editor of IEEE Robotics and Automation Letters, Scientific Reports, RSS, ICRA, IROS, RoboSoft, and the Journal of Robotics and Mechatronics. He has worked at leading laboratories for robotics and neuromotor control, including the Laboratory for Computational Motor Control, Johns Hopkins University, MIT Computer Science and Artificial Intelligence Lab (CSAIL), and Harvard Neuromotor Control Lab. He is and has been PI on EPSRC and EU funded projects of more than £5 million that have pushed the boundaries of our understanding on how conditioning the body improves the efficacy of action and perception in human-human and human-robot interactions.
Work experience
- September 2021 - present: Professor of Robotics, Imperial College London, London
- January 2017 – September 2021: Reader in Design Engineering and Robotics, Imperial College London, London
- Sep 2012 – December 2016: Senior Lecturer, Department of Informatics, King’s College London, London.
- March 2008 – Sep 2012: Lecturer, Division of Engineering, King’s College London, London.
- July 2007 – January 2008: Postdoctoral research fellow, School of Engineering and Applied Sciences, Harvard University, Cambridge, MA.
- February 2008 – August 2008: Visiting Scholar, School of Engineering and Applied Sciences, Harvard University, Cambridge, MA.
- September 2008 – June 2009: Radcliffe Fellow, Radcliffe Institute for Advanced Studies, Harvard University, Cambridge, MA.
- April 2008 – June 2009: Research Affiliate, Computer Science and Artificial Intelligence Laboratory (CSAIL), MIT, Cambridge, MA.
- August 2003 – June 2008: Senior lecturer, Department of Mechanical Engineering, University of Moratuwa, Moratuwa, Sri Lanka
- November 2001 – July 2003: Postdoctoral Fellow, Department of Biomedical Engineering, School of Medicine, Johns Hopkins University, Baltimore, MD.
Personal bio
I was born in Galle, Sri Lanka and did primary and secondary education in Richmond College, Galle, one of the oldest Methodist Missionary Schools in South Asia. I was not a very studious student upto year 7. I became last in the class of year 7 and had to leave the top group in the grade. This woke me up. I took an advice from my eldest brother that we humans can reach any goal if the will is there. It came with a compelling example while we were working in the small paultry farm in the backyard. I started to think differently, and as a result, I not only did well in the school over the next 5 years, but also came within the top 10 in Sri Lanka in the country-wide A/L university entry examination out of more than 200,000 students. I was lucky to be admitted to the University of Moratuwa with a Mahapola Fulbright Scholarship to study Engineering. I graduated with a First Class Honors Degree in Engineering, majoring in Electrical Engineering in 1996. A volunteer project I did with my brother's PhD supervisor in Japan opened up an opportunity to go to Saga University, Japan, to do postgraduate studies with a Japanese Government Monbusho Scholarship in 1996. I got an MSc with distinction in Systems Control, and PhD in Robotics from Saga University in 1998 and 2001 respectively. Then I moved to US to do a postdoc in Computational Human Motor Control with Professor Reza Shadmehr at the School of Medicine, Johns Hopkins University.
In 2003, there was a peace treaty in the Sri Lanka’s civil war. I returned to Sri Lanka to set up a bio-inspired robotics lab in the University of Moratuwa to support the on-going humanitarian landmine detection work in the war-torn Northern part of the country. Some of this work was featured in the Harvard magazine and the New Scientist Magazine. During this time, I also served as the Commissioner of the Sri Lanka Inventors Commission. I left Sri Lanka in 2006. Susequently, I was a Radcliffe Fellow at Harvard University, and a Research Affiliate at CSAIL, MIT. I accepted a lecturership at Kings College London in 2008 and started the Morph Lab. I moved the lab to Dyson School of Design Engineering, Imperial College London in 2017. Since then, I have been enjoying the great robotics community and the nurturing environment at Imperial.
I regularly practice Vipassana Meditation in the Buddhist Theravadha Tradition at Amaravati and Cittaviveka Buddhist Monasteries. In parallel, I practice Karate under Sense Ben Spillard and Sense Sue Spillard. We use a mix of following Seiki Juku tradition. I became a Black Belt in 2017, and I secured my Second Dan Black Belt in July 2023. I wrote this Blog Piece about this experience. Vipassana meditation has helped me to enjoy the inner peace, fearlessness, and confidence and Karate has helped me to develop very complementary qualities such as patience, respect, and good health. I am married with two children. I take this opportunity to thank my wife, Visakha who has been a friend and a critic who filled my life with love and happiness all the way from the undergraduate days at the University of Morwatuwa through raising our two kids.
- 14/04/2024: Invited talk titled “Unveiling the Brain's Efficiency: Insights from Soft Robotics”, workshop on Robot Inspired Biology, RoboSoft24, San Diego, USA 2024
- 14/04/2024: Invited talk titled “How Interactive Robotic Patients can help Medical Trainees to be Robust in Diverse Social Contexts”, RoboSoft24, workshop on Democratising Soft Robots, San Diego, USA 2024
- 11/04/2024: Keynote speech titled “Algorithms in physical ghost circuits for robots in partially known environments”, NASA Jet Propulsion Laboratory, Pasadena, USA 2024
- 05/04/2024: Guest seminar titled “Algorithms in physical ghost circuits for robots in partially known environments”, Johns Hopkins Computational Motor Control Lab, Baltimore, USA 2024
- 09/10/2023: Invited talk titled “A soft robotics approach to understand biological secrets of complex interactions”, Boston Action Club, Boston, 2023
- 06/10/2023: Invited talk titled “Soft robotics for safe interactions”, Boston University, Boston, 2023
- 06/10/2023: Invited talk titled “A soft robotics approach to understand biological secrets of complex interactions”, Harvard University, Boston, 2023
- 10/07/2023: Keynote for the BMW group on "From Biological Perception to Intelligent Automotives: Leveraging the lessons learned from soft robotics research to enhance human-car interaction", Biweekly BMW Artificial Intelligence, Robotics, and Machine Learning Forum and Technical Seminars.
- 21/05/2023: Keynote speech on "A robotics approach to understand how the brain tunes the body to solve dynamic interaction problems", IEEE IAS GlobConET 2023, London, 2023
- 10/04/2023: The brain is lazy, IEEE Robosoft 2023, Singapore, 2023
- 20/01/2023: Keynote on "Soft robotics for creative computing", Creative Computing Institute, London, 2023
- 23/10/2022: Embodiment and likelihood functions of haptic perception, IROS 2022, Kyoto Japan, 2022
- 25/08/2022: Keynote speech titled "Empowered human co-existence with cobots and soft robots", ICITACEE 2022, Semarang, Semarang City, Central Java, Indonesia, 2022
- 25/05/2022: RoboPatient: Robot-assisted learning of real-time multimodal sensor integration during physical examination of a patient, IEEE ICRA22 - Workshop on "Intelligent Control Methods and Machine Learning Algorithms for Human-Robot Interaction and Assistive Robotics", Philadelphia, 2022
- 19/05/2022: A soft robotics approach to understand brain’s approaches for embodied haptic information gain, MIT, Cambridge, USA, 2022
- 04/04/2022: Visuo-haptic sensor integration during medical palpation, IEEE RoboSoft conference - workshop on Soft Robotics and Embodied Intelligence, Edinburgh, 2022
- 23/03/2022: Embodied nature of haptic perception, University of Cambridge, UK, 2022
- 07/10/2021: A soft robotics approach to understand how the brain conditions the body to make realtime computation more efficient, IEEE IAS GUCON 2021, USA, 2021
- 16/09/2021: A Soft Robotics Approach to Understand Embodied intelligence, 2021 International Workshop on Bionic Engineering, University of Manchester, 2021
- 09/09/2021: A mountain goat inspired robotic leg for outdoor navigation, Technical University of Munich - Imperial College joint workshop, Munich, 2021
- 09/06/2021: A soft robotic patient to learn physical examination with multimodal sensor integration, UK RAS Strategic Task Group for Soft Robotics - Industry collaboration workshop, Bristol, 2021
- 13/04/2021: STIFF-FLOP and beyond - soft robotics for medical training, IEEE RoboSoft 2021, Piscataway, USA, 2021
- 24/03/2021: Shared computation between the brain and the body, Embodied Intelligence workshop, Online, 2021
- 06/09/2020: Workshop keynote speaker, Eurohaptics 2020 -Workshop on ''Active haptic humans and robots (THUMB)": Artificial haptic systems, Amsterdam.
- 03/09/2020: Invited speaker, 5th European COST Conference on Artificial Intelligence in Finance and Industry, Zurich.
- 24/07/2020: Guest in IEEE RAS Soft Robotics Podcast.
- 13/07/2020: One of the 5 panellists in the First IEEE RAS debate on Soft Robotics, Control Theory, and Morphological Computation.
- 23/09/2019: UK/US Bio-inspired Unmanned Autonomous Systems (BioUAS), Plenary talk titled "The brain is lazy" highlighting the clever ways it takes to condition the body to simplify autonomous control, Imperial College London, UK.
- 27/06/2019: Plenary workshop talk on "Embodied computation of perception and action for fast uncertainty reduction", Robotics Science and Systems (RSS) 2019, Freiburg, Germany.
- 14/04/2019: IEEE RoboSoft 2019,Plenary workshop talk at IEEE RoboSoft 2019 on "Towards the nature of information processing in soft machines", Seoul, South Korea.
- 14/04/2019: IEEE RoboSoft 2019, workshop organizer and workshop talk at IEEE RoboSoft 2019 on "Morphological Computation Through Physical Adaptation of SoftRobots", Seoul, South Korea.
- 24/04/2018: IEEE RoboSoft 2018,Plenary workshop talk at IEEE RoboSoft 2018 on "Haptic information gain in the impedance domain", Levorno, Italy.
- 23/05/2018: IEEE ICRA2018,Plenary workshop talk at IEEE ICRA2018 on "Brain is the last resort", Brisbane, Australia.
- 27/05/2018: IEEE ICRA2018,Invited workshop talk at IEEE ICRA2018 on "Active search for haptic information in the impedance domain", Brisbane, Australia.
- 02/05/2018: University of Leeds, Keynote on "Surviving in an uncertain world with slow communication pathways", Leeds, UK.
- 04/10/2018: RCGP-2018, workshop keynote speech at Royal College of General Practitioners annual conference on "Soft Robotic Patients for Medical Education", Glasgow, UK.
- 17/08/2018: Xuzhuo Central Hospital, Keynote speech at Xuzhou Central Hospital on "SoftRobotics for Rehabilitation", Xuzhou, China
- 23/08/2018: Jilin University, Keynote speech at International Workshop on Bioinspiration on "Morphological computation - The role of the physical circuits in the body in the computation of perception and action", Jilin, China.
- 11/10/2017: IEEE PIMRC, Plenary keynote at IEEE PIMRC on "Survival in uncertain environ-ments with slow communication pathways – evidence from morphological computation", Montreal, Canada.
- 12/12/2017: IMechE Christmas event, Keynote at IMechE Christmas event – "Tinkering" on "If robots were to survive like living beings in uncertain environments", London, UK.
- 18/12/2017: LIPI workshop, Keynote at Indonesia Institute of Science and technology on "Softrobotics for sustainable rainforest communities", Bandung, Indonesia.
- 10/07/2017: 2nd UK manipulation workshop, Invited talk on "Surviving with slow communication pathways", London, UK.
- 23/03/2017: ERU-2017, co-organizer and speaker in the Workshop on "Haptics for Healthcare", Edinburgh, UK.
- 05/07/2017: University of Cambridge, Invited talk at University of Cambridge on "Soft robotics and morphological computation", Cambridge, UK.
June 2025 - February 2026
Title: A portable soft robotic patient simulator for training physical examination skills to improve early diagnosis accuracy
Funding Body: UK Medical Research Council (MRC), Principal Investigator, total amount £300k
October 2024 - September 2026
Title: Kirigami Inspired Soft Tethered Probe (KISTP)
Funding Body: Advanced Research and Invention Agency (ARIA), Principal Investigator, total amount £490k
January, 2021-September, 2024
Title: Natural Intelligence: robotic monitoring of habitats
Funding body: European Union H2020, total amount Euro 3 million, Principal Investigator, Imperial College, amount £483k.
July, 2019-March, 2023
Title: RoboPatient: Robot-Assisted Learning of Constrained Haptic Information Gain
Funding body: Engineering and Physical Sciences Research Council (EPSRC), Principal Investigator, coordinator) , amount £1.6 million
July, 2016-July, 2019
Title: MOTION – Morphological Computation of Perception and Action
Funding body: Engineering and Physical Sciences Research Council (EPSRC), Principal Investigator, coordinator) , amount £1.2 million.
December 2014-November, 2017
Four by Three
Funding body: European Union H-2020 grant, grant agreement no:637095, Co-Investigator, £500k.
January, 2012-Jan, 2016
Title: STIFF-FLOP – STIFFness controllable Flexible and Learn-able Manipulator for surgical OPerations
Funding body: European Union FP7 Call-7 grant, Call identifier: FP7-ICT-2009-7, Co-Investigator, technical manager of the consortium, (KCL amount (coordinator): Euro 1.3m, total consortium grant: Euro 7.38m).
March, 2011-Sept, 2012
Title Impedance control on uncertain objects
Funding body: EPSRC first grant, Engineering and Physical Sciences Research Council, Principal Investigator,
(amount: £97k).
March, 2011-Dec, 2014
Title: DARWIN-Dextrous Assembler Robot Working with embodied INtelligence
Funding body: European Union FP7 Call-6 grant, Call identifier: FP7-ICT-2009-6, Principal Investigator
(amount: Euro 480k).
April, 2011-Sept, 2014
Title: REINS: Human robot interaction through reins
Funding body: EPSRC , Engineering and Physical Sciences Research Council, Co-Investigator in collaboration with Sheffield Hallam University, (amount: £200k).
March, 2011-Dec, 2014
Title: TOMSY-Topological Motion Synthesis for Dexterous Manipulation
Funding body: European Union FP7 Call-6 grant, Call identifier: FP7-ICT-2009-6, Co-Investigator, (amount: £535k).
April, 2009
Title: Radcliffe Exploratory Seminar on Technologies for Humanitarian Demining
Funding body: Award to organize an exploratory seminar, Radcliffe Institute for Advance Studies, Harvard University, Co-organizer with Prof. Robert Howe, Associate Dean, School of Engineering and Applied Sciences, Harvard University, (amount: USD14k).
Jan, 2006-Dec, 2006
Title: Deployment of a colony legged mobile robots for landmine detection: An extension to MURALI I (Moratuwa University Robot for Anti- landmine Intelligence)
Funding body: Grant no. RG/ 2006/TDPS/02, National Science Foundation of Sri Lanka (NSF), Principal Investigator, (amount: Rs. 2,720k). Sri Lanka
Jan, 2005-Dec, 2006
Title: Development of an embedded sensor to detect red-weevil larvae in early stages
Funding body: Grant no. 12/620/467, Council for Agricultural Research Policy of Sri Lanka (CARP), Principal Investigator, (amount: Rs. 553.12k). Sri Lanka
Jan, 2004-Dec, 2005
Title: A robotic system for landmine detection
Funding body: Grant no. RG/ 2004/ E02, National Science Foundation, Principal Investigator, (amount: Rs. 902.5k). Sri Lanka
- 2024: Senior editor, International Journal of Robotics Research (IJRR).
- 2022: Associate editor, Scientific Reports, Nature Publishing Group.
- 2020: Special Issue Editor, International Journal of Robotics Research (IJRR): Special issue based on accepted papers in RSS 2020.
- 2020: One of the four editorial board members, Frontiers special issue on Current Advances in Soft Robotics: Best Papers from RoboSoft 2018.
- 2019: One of the five Program Chairs, Flagship IEEE International Conference of Robotics and Automation (ICRA) 2023 to be held in London, IEEE, USA.
- 2019 onwards: Associate Editor, IEEE Robotics and Automation Letters (RAL journal), IEEE, USA.
- 2018 onwards: Regional chair, Robotics: Science and Systems (RSS), IEEE, USA.
- 2016 onwards: Associate editor, IEEE International Conference on Robotics and Automation (ICRA), IEEE, USA.
- 2016 onwards: Associate editor, IEEE International Conference on Intelligent Robotics and Systems (IROS), IEEE, USA.
- 2018 onwards: Associate editor/publications chair, IEEE International Conference on SoftRobotics (RoboSoft), IEEE, USA.
- 2015 onwards: Associate editor, Frontiers Soft Robotics Specialty, editor in chief: Prof. Cecilia Laschi, Frontiers, Switzerland.
- 2016 onwards: Associate editor, Journal of Robotics and Mechatronics, editor in chief: Prof. Yoshihiro Takita (National Defence Academy of Japan), JRM, Japan.
- 2005 onwards: Associate editor, Journal of Control and Intelligent Systems, editor in chief: Prof. Clarence de Silva, ACTA Press, Canada.
- 2010 onwards: Program Chair, IEEE International Conference on Information and Automation for Sustainability, Sri Lanka, Australia, China.
- 2005: Founding General Chair, International Conference on Information and Automation for Sustainability, with IEEE technical co-sponsorship, Sri Lanka, Australia, China.
- 2012: Program committee, 2012 IEEE/SICE International Conference on System Integration (SII2012), December 16-18, 2012, Fukuoka, Japan.
First IEEE Soft Robotics public debate on Morphological Computation and Control. Watch more videos in our YouTube channel.
First IEEE Soft Robotics debate
First IEEE Soft Robotics public debate on Morphological Computation and Control.Areas of expertise
- Haptic interfaces and interaction
- Soft robotic sensors and actuators
- Optimisation and machine intelligence
- Wearable robotics
Equipment and facilities available in the lab


Franka robotic arm shared with Petar Kormushev's group



In addition we have
- 3 Empatica wearable wristbands to monitor user experience in human-robot interaction experiments.
- Wireless Noraxon EMG sensor kit
- Wireless EEG sensor kit
- ATI force sensors and load cells
- High end computing facilities for simulations