It is hard to seperate sensors and actuators in biological beings. Spindles and tendons are parts of muscles, and mechanoreceptors are a part of soft tissue. This means, pysical dynamics of soft tissue and musculo-skeletal structures and perception are intrinsically coupled. This offers the advantage of conditioning sensors to suit a task. We have taken a soft robotics approach to understand more about this. Here are some of our publications in this area:
- He, L., Herzig, N., de Lusignan, S., Scimeca, L., Maiolino, P., Iida, F., & Nanayakkara, T. "An Abdominal Phantom with Tunable Stiffness Nodules and Force Sensing Capability for Palpation Training", IEEE Transactions on Robotics, 2020. [PDF]
- Liang He, Icey Lu, Sara Adela Abad Guaman, Nicolas Rojas, and Thrishantha Nanayakkara, “Soft Fingertips with Adaptive Sensing and Active Deformation for Robust Grasping of Delicate Objects”, IEEE Robotics and Automation Letters (RAL), 2020. [PDF] [Media]
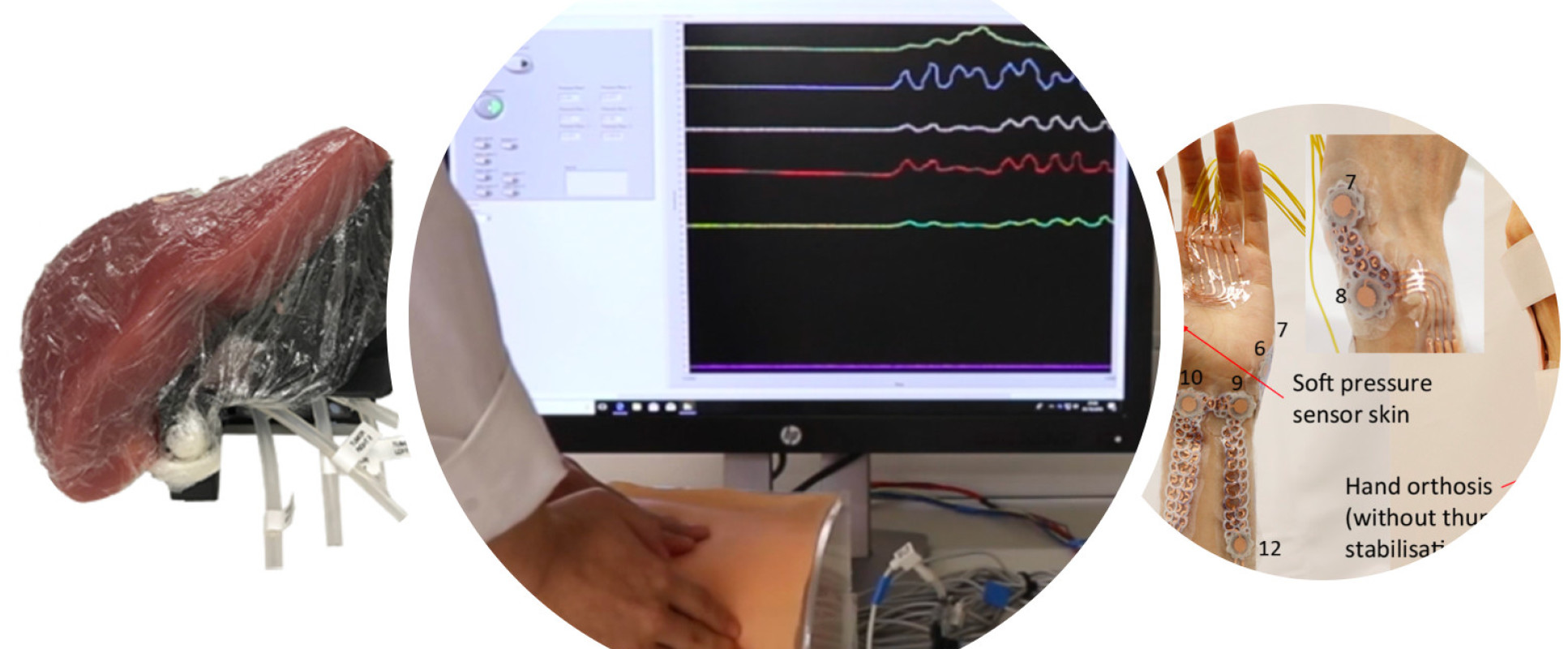
- Xinyang Tan, Liang He, Jiangang Cao, Wei Chen, Thrishantha Nanayakkara, “A Soft Pressure Sensor Skin for Hand and Wrist Orthoses”, IEEE Robotics and Automation Letters (RAL), 2020. [PDF][Media]
- Hadi Sadati, Ali Shiva, Daniel Rucker, Christos Bergeles, Ian Walker, Helmut Hauser, Kaspar Althoefer, and Thrishantha Nanayakkara, “Real-time Shape and Tip Force Estimation of a Continuum Appendage from Base Load Readings: A Stiffness Imaging Application”, IEEE International Conference on Robotics and Automation (ICRA) 2020. [PDF]
- Liang He, Icey Lu, Sara Adela Abad Guaman, Nicolas Rojas, and Thrishantha Nanayakkara, “Soft Fingertips with Adaptive Sensing and Active Deformation for Robust Grasping of Delicate Objects”, IEEE International Conference on Robotics and Automation (ICRA) 2020.
- Xinyang Tan, Liang He, Chen Wei, Thrishantha Nanayakkara, “A Soft Pressure Sensor Skin for Hand and Wrist Orthoses”, IEEE International Conference on Robotics and Automation (ICRA) 2020.
- Qiujie Lu, Liang He, Thrishantha Nanayakkara, Nicolas Rojas, “Precise In-Hand Manipulation of Delicate Objects using Soft Fingertips with Adaptive Sensing and Active Deformation”, 3rd IEEE International Conference on Soft Robotics (RoboSoft), 2020.
- Josie Hughes, Perla Maiolino, Thrishantha Nanayakkara, Fumiya Iida “Sensorized Phantom For Characterizing Large Area Deformation of Soft Bodies for Medical Applications”, 3rd IEEE International Conference on Soft Robotics (RoboSoft), 2020.
- He, L., Herzig, N., de Lusignan, S., & Nanayakkara, T. (2018, July). Granular Jamming Based Controllable Organ Design for Abdominal Palpation. In 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (pp. 2154-2157). IEEE. PDF
- Ranasinghe, A., Dasgupta, P., Nagar, A., & Nanayakkara, T. (2018). Human Behavioral Metrics of a Predictive Model Emerging During Robot-Assisted Following Without Visual Feedback. IEEE Robotics and Automation Letters, 3(3), pp. 2624-2631. PDF
- Damith Suresh Chathuranga, Zhongkui Wang, Yohan Noh, Thrishantha Nanayakkara, Shinichi Hirai, “A Soft Three Axis Force Sensors that is Useful for Robot Grippers”, 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 5556 – 5563, DOI: 10.1109/IROS.2016.7759817, 2016. PDF
- Damith Suresh Chaturanga, Zhongkuti Wang, Yohan Noh, Thrishantha Nanayakkara, and Shinichi Hirai, “Robust real Time Material Classification Algorithm using Soft Three Axis Tactile Sensor: Evaluation of the Algorithm”, pp.2093 – 2098, DOI: 10.1109/IROS.2015.7353655, IROS 2015. PDF
- Li, Min, Jelizaveta Konstantinova, Emanuele L. Secco, Allen Jiang, Hongbin Liu, Thrishantha Nanayakkara, Lakmal D. Seneviratne, Prokar Dasgupta, Kaspar Althoefer, and Helge A. Wurdemann. “Using visual cues to enhance haptic feedback for palpation on virtual model of soft tissue.” Medical & Biological Engineering & Computing, pp. 1177 – 1186, vol. 53, no. 11, 2015. PDF
- Li, Min, Shan Luo, Thrishantha Nanayakkara, Lakmal D. Seneviratne, Prokar Dasgupta, and Kaspar Althoefer. “Multi-fingered haptic palpation using pneumatic feedback actuators.” Sensors and Actuators A: Physical 218 (2014): 132-141. PDF
- Sina Sareh, Allen Jiang, Angela Faragasso, Yohan Noh, Thrishantha Nanayakkara, Prokar Dasgupta, Lakmal Seneviratne, Helge Arne Wurdemann, Kaspar Althoefer , “Bio-Inspired Tactile Sensor Sleeve for Surgical Soft Manipulators”, in IEEE International Conference on Robotics and Automation (ICRA), pp.1454 – 1459, DOI: 10.1109/ICRA.2014.6907043, 2014. PDF
- Seyedmohammadhadi Sadati, Ali Shiva, Nicolas Herzig, Caleb Rucker, Helmut Hauser, Ian Walker, Christos Bergeles, Kaspar Althoefer, Thrishantha Nanayakkara, “Stiffness Imaging with a Continuum Appendage: Real-time Shape and Tip Force Estimation from Base Load Readings”, IEEE Robotics and Automation Letters (RAL), 2020. [PDF][Media]
Contact the PI
Professor Thrishantha Nanayakkara
RCS1 M229, Dyson Building
25 Exhibition Road
South Kensington, SW7 2DB
Email: t.nanayakkara@imperial.ac.uk