Imperial Robotics Papers at ICRA 2020
Soft grasping - from simulation to reality
Robotics research drives improvements in our society. Top research from Imperial academics has international audiences, including at ICRA 2020
Showcasing robotics research from Imperial College at the top robotics conference of 2020
Robotic solutions are improving our lives, contributing innovative solutions in our healthcare, providing interactive help in our homes and ensuring the safe and smart use of our infrastructure. Fundamental robotics research at Imperial College London is helping to drive this change, and 2020 has so far seen 25 papers from the labs that make up the Imperial Robotics Forum accepted into the top robotics conference ICRA.
IEEE International Conference on Robotics and Automation (ICRA)
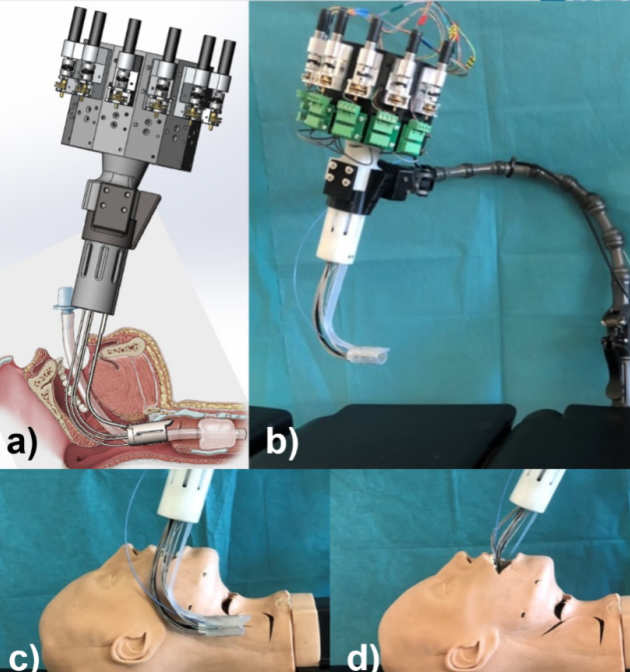 LaryngoTORS: A Novel Cable-Driven Parallel Robotic System for Transoral Laser Phonosurgery. IEEE RA-L. Zhao M, Vrielink TJCO, Kogkas AA, Runciman MS, Elson DS, Mylonas GP - HARMS Lab
LaryngoTORS: A Novel Cable-Driven Parallel Robotic System for Transoral Laser Phonosurgery. IEEE RA-L. Zhao M, Vrielink TJCO, Kogkas AA, Runciman MS, Elson DS, Mylonas GP - HARMS Lab
Data-Efficient Garment Grasping and Manipulation for Robot-Assisted Dressing. Fan Zhang and Yiannis Demiris - Personal Robotics Lab
Improving Generalisation in Learning Assistance by Demonstration for Smart Wheelchairs. Vinicius Schettino and Yiannis Demiris - Personal Robotics Lab
Nonlinear MPC with Motor Failure Identification and Recovery for Safe and Aggressive Multicopter Flight. Dimos Tzoumanikas, Qingyue Yan and Stefan Leutenegger - Smart Robotics Lab. See the video here!
Fast Frontier-Based Information-Driven Autonomous Exploration with an MAV. Anna Dai, Sotiris Papatheodorou, Nils Funk, Dimos Tzoumanikas, Stefan Leutenegger - Smart Robotics Lab. See the video here!
Towards the Probabilistic Fusion of Learned Priors into Standard Pipelines for 3D Reconstruction. Tristan Laidlow, Jan Czarnowski, Andrea Nicastro, Ronald Clark, Stefan Leutenegger - Dyson Robotics Lab
A Novel Sensing Method to Detect Tissue Boundaries during Robotic Needle Insertion Based on Laser Doppler Flowmetry. Vani Virdyawan, Orsina Dessi, and Ferdinando Rodriguez y Baena - Mechatronics in Medicine Lab
Design and Workspace Characterisation of Malleable Robots, A.B. Clark and N. Rojas – REDS Lab. See the video here!
An Origami-Inspired Variable Friction Surface for Increasing the Dexterity of Robotic Grippers, IEEE RA-L, Q. Lu, A.B. Clark, M. Shen, and N. Rojas - REDS Lab. See the video here!
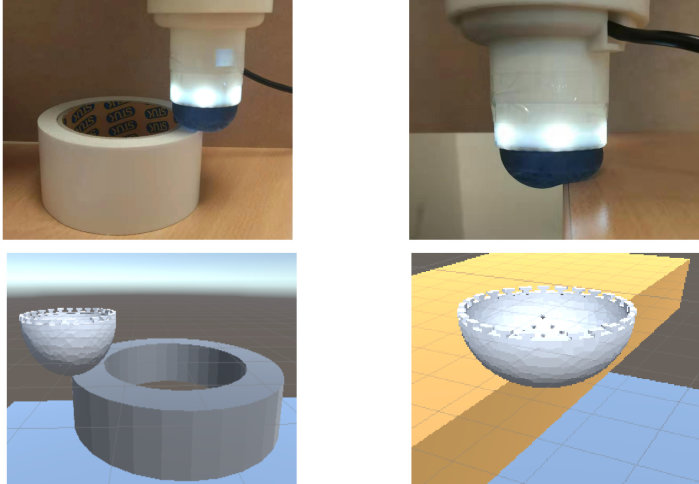
Soft Fingertips with Tactile Sensing and Active Deformation for Robust Grasping of Delicate Objects, IEEE RA-L, L. He, Q. Lu, SA. Abad, N. Rojas, and T. Nanayakkara - REDS Lab. See the video here!
Real-time Shape and Tip Force Estimation of a Continuum Appendage from Base Load Readings: A Stiffness Imaging Application. Hadi Sadati, Ali Shiva, Daniel Rucker, Christos Bergeles, Ian Walker, Helmut Hauser, Kaspar Althoefer, and Thrishantha Nanayakkara – MORPH Lab.
Soft Fingertips with Adaptive Sensing and Active Deformation for Robust Grasping of Delicate Objects. Liang He, Icey Lu, Sara Adela Abad Guaman, Nicolas Rojas, and Thrishantha Nanayakkara - MORPH Lab.
Significance of the Compliance of the Joints on the Dynamic Slip Resistance of a Bioinspired Hoof. Sara Adela Abad Guaman, Nicolas Herzig, Hadi Sadati, and Thrishantha Nanayakkara – MORPH Lab.
A Soft Pressure Sensor Skin for Hand and Wrist Orthoses. Xinyang Tan, Liang He, Chen Wei, Thrishantha Nanayakkara - MORPH Lab.
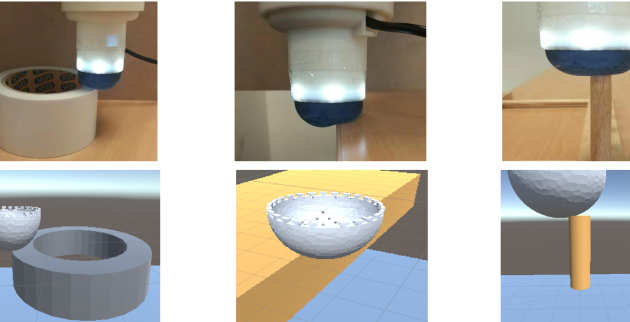 Sim-to-Real Transfer for Optical Tactile Sensing. Zihan Ding, Nathan Lepora, Edward Johns - Robot Learning Lab
Sim-to-Real Transfer for Optical Tactile Sensing. Zihan Ding, Nathan Lepora, Edward Johns - Robot Learning Lab
Constrained-Space Optimization and Reinforcement Learning for Complex Tasks. Ya-Yen Tsai, Bo Xiao, Edward Johns, Guang-Zhong Yang - Robot Learning Lab and the Hamlyn Centre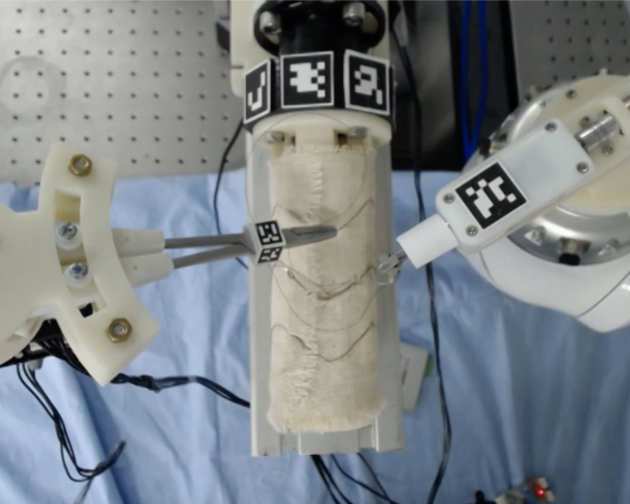
Generative Localisation with Uncertainty Estimation through Video-CT data for Bronchoscopic Biopsy. IEEE RA-L. Cheng Zhao, Mali Shen, Li Sun and Guang-Zhong Yang – Hamlyn Centre. See the video here!
Bio-inspired matched filtering as the basis of obstacle negotiation in micro aerial systems. Rui Zhou and Huai-Ti Lin - Neuromechanics and Bioinspired Technologies Lab
DeepFactors: Real-Time Probabilistic Dense Monocular SLAM. IEEE RA-L. Jan Czarnowski, Tristan Laidlow, Ronald Clark, Andrew J. Davison – Dyson Robotics Lab. See the video here!
Towards the Probabilistic Fusion of Learned Priors into Standard Pipelines for 3D Reconstruction. Tristan Laidlow, Jan Czarnowski, Andrea Nicastro, Ronald Clark, Stefan Leutenegger - Dyson Robotics Lab
Comparing View-Based and Map-Based Semantic Labelling in Real-Time SLAM. Zoe Landgraf, Fabian Falck, Michael Bloesch, Stefan Leutenegger, Andrew Davison. - Dyson Robotics Lab. See the video here!
RLBench: The Robot Learning Benchmark & Learning Environment. IEEE RA-L. Stephen James, Zicong Ma, David Rovick Arrojo, Andrew J. Davison - Dyson Robotics Lab. See the video here!
Learning One-Shot Imitation from Humans without Humans. IEEE R-AL. Alessandro Bonardi, Stephen James, Andrew J. Davison - Dyson Robotics Lab. See the video here!

Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Eloise Matheson
Department of Mechanical Engineering