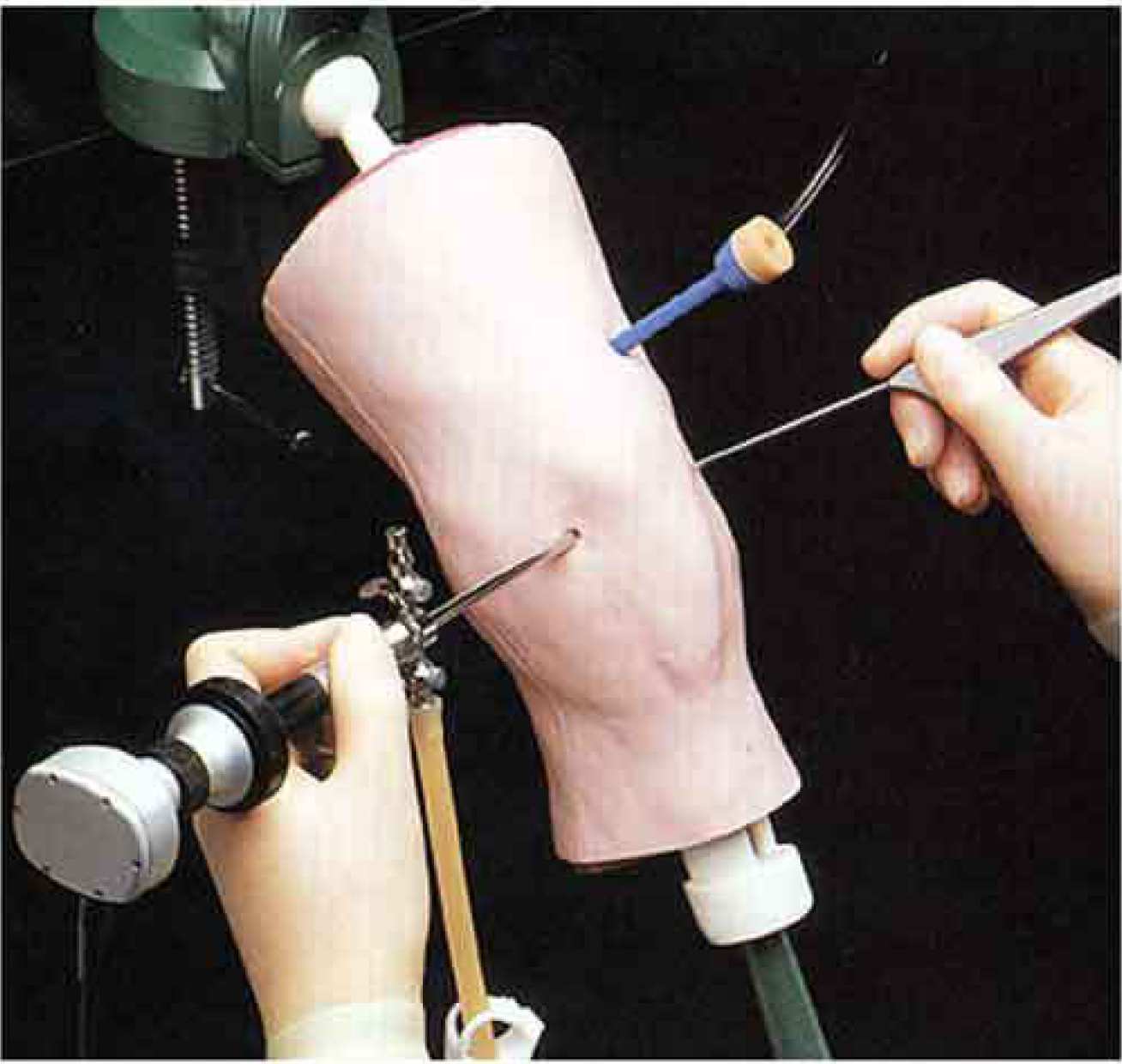
A proprietary haptic system was developed to give surgeons the sense of touch in a virtual reality simulation of knee arthroscopy surgery. During real diagnostic knee arthroscopy, the surgeon operates inside the knee with long tools (an endoscope and a hooked probe) that pass through keyholes in the skin. The surgeon uses visual and haptic (touch) feedback to diagnose problems in the knee.
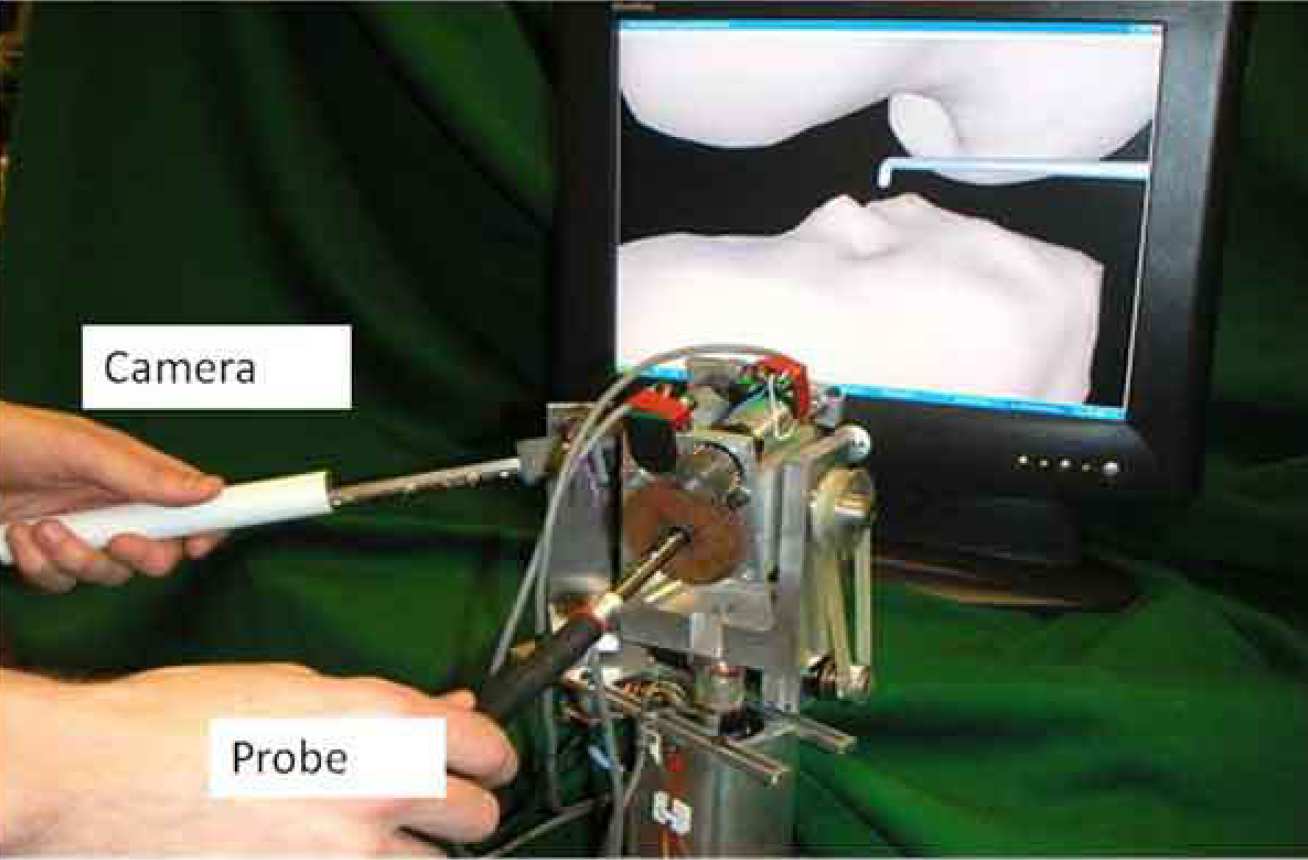
In the virtual reality simulation, a haptic device is used to replace the real hooked probe. The virtual model of the hooked probe moves when the haptic device is moved. When the virtual model of the hooked probe contacts a virtual bone model, the haptic device physically generates a reaction force through motor torque. This system allows surgeons to practice diagnosis tasks on a realistic virtual patient before examining a real patient.
We developed our own haptic device, based on specifications observed and measured during real knee arthroscopy. Furthermore, we developed a special purpose haptic rendering algorithm, to faithfully recreate the touch sensations from contact anywhere along the virtual model of the hooked probe. This allows the user, for example, to hook and pull on virtual surfaces in the simulation.
Contact details
Prof. Ferdinando Rodriguez y Baena
Co-Director Hamlyn Centre, Professor in Medical Robotics
Prof. Brian Davies
Senior Research Investigator