Neural surgery may be of fatal risk. To improve surgery safety, the Mechantronics in Medicine (MIM) lab of Imperial College London has develop a new Minimal Invasive neurosurgery robot which is soft and compliant needle capable of steering in the soft tissue of the brain. Its design is inspired by the ovipositing wasps, which are capable of steering their stings in different tissues towards a target point. Besides the new robot, MIM lab also develop many new technologies in surgery planning and execution. In further, the robot and new technology of surgery planning and control will make the neural surgery produce less trauma, avoid the key functionality of the brain and reach the target deep in brain despite the vibrating and deforming motion of a living brain.
The Robotic Operating System
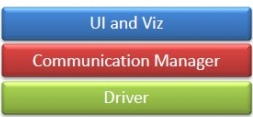 To be reusable and extensible, the software system adopts a modular structure. Components areroughly categorized into three layers, as shown in Figure 4 The visualization and interface layer2) The communication managing layer3) The driver layerTo minimize coding work, for many components, several available open source software librarieshave been used.
To be reusable and extensible, the software system adopts a modular structure. Components areroughly categorized into three layers, as shown in Figure 4 The visualization and interface layer2) The communication managing layer3) The driver layerTo minimize coding work, for many components, several available open source software librarieshave been used.
Imageing Processing
Path Planning
The STING robot is connected to a computer, which runs the software which can produce surgery plan intelligently on the fly. Even for computer, neural surgery planning is very challenging task, thus MIM lab invested lots of effort in developing the surgery planning software to generate better surgery plan faster.
Risk Minimization
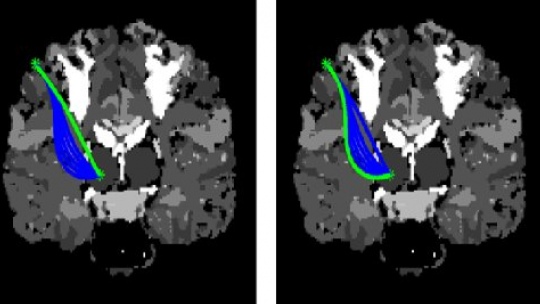
The brain is very important and delicate organ, some areas serve key functionality, where trauma will be fatal (the white area). Surgery paths avoid such areas. The planning software first generates many safe paths, likes growing a tree.
Smooth&Bounded Curvature
The path is refined further because of the bending (curvature) behaviour of the flexible STING, which only bends gradually with a limit.
Contact details
Prof. Ferdinando Rodriguez y Baena
Co-Director Hamlyn Centre, Professor in Medical Robotics
Prof. Brian Davies
Senior Research Investigator