Medical Motivation
The current trend in medical intervention favors a less invasive approach with a tendency to localized therapy. Common procedures employed in modern clinical practice involve percutaneous insertion of needles and catheters for biopsy and drug delivery, blood/fluid sampling, catheter insertion, cryogenic or electrolytic ablation, brachytherapy, deep brain stimulation, diagnostic imaging, and a number of minimally invasive surgical procedures.
The Biological Inspiration
Nature is often a good inspiration for demanding engineering tasks and, particularly, a novel smart actuator has being inspired by the penetration strategy developed by ovipositing wasps: these insects can penetrate different kind of tissues (wood, leaves, host larvae) to lay their eggs. The ovipositor of the wood wasp, Sirex noctilio, for example, has the main function of delivering eggs through a hollow tube along its length. Its tip is about 0.2~0.3mm in diameter and can drill to a depth of up to 20mm into the sapwood of a tree. The applicability of the wood wasp’s anatomy resides in the mechanism of drilling, which does not require rotary motion or impaction.
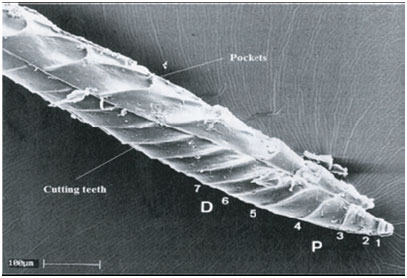
The ovipositor is made of two interlocked halves, or “valves,” rather like the zip on a “zip-lock” polyethylene bag, which slide relative to each other. Backward pointing teeth (numbered in Fig. 1b) hold on to the substrate, resisting pulling forces. The pull on one of the valves provides stabilization along the length of the ovipositor to prevent buckling so that the other valve can be pushed with an equal and opposite force, to produce a net force near zero. The reciprocating motion of the two valves drives the ovipositor’s penetration, as one valve is pushed deeper into the wood stabilized by tension generated in the other valve. Since there is no net force in the ovipositor assembly, there are no stability problems and there is no theoretical limit on its length.
J. F. V. Vincent and M. J. King. The mechanism of drilling by wood wasp ovipositors. Biomimetics, 3(4):187–201, 1995.
Wood wasp, Sirex noctilio, drilling into wood:

Scanning electron micoscope view of the ovipositor tip:
The Project
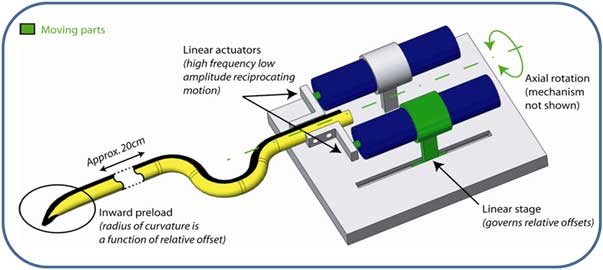
A biomimetic flexible steerable probe is currently being developed at Imperial College London: the aim is the access of deep brain areas with minimum damage in order to accurately place minimally invasive instrumentation (catheters, electrodes for deep brain stimulation), to perform clinical analysis and diagnosis (biopsy, sampling), localized drug delivery and micro neurosurgery.
Model of the biomimetic flexible and steerable probe:
FP7 ROBOCAST, Eurpean project
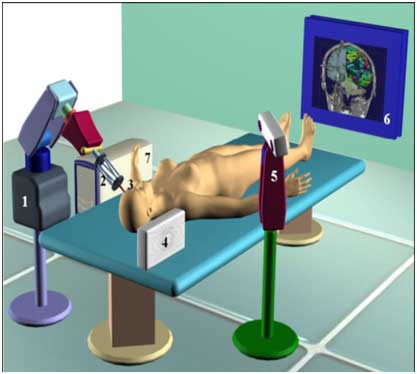
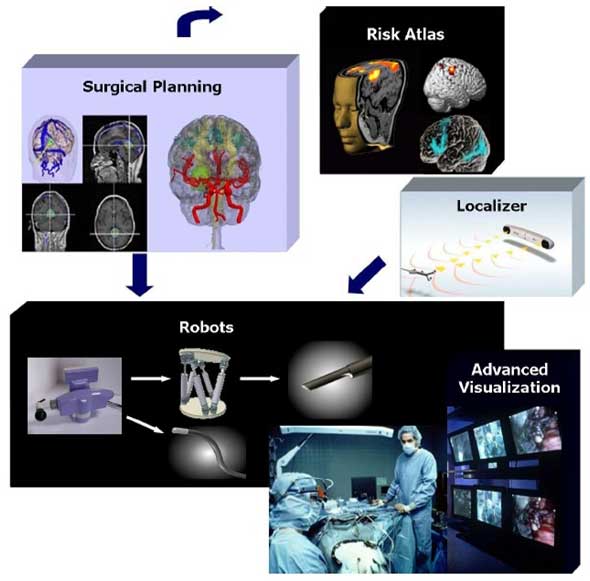
ROBOCAST is a 3 year European project (Framework 7 funding) to develop an integrated neurosurgical suite. Robotic assistance, smart sensors, augmented reality and an intelligent user interface are among the deliverables of the project. Imperial’s involvement in ROBOCAST pertains to the development of the biologically inspired flexible probe for brain interventions, described above. Visit www.robocast.eu for more information.
Project consortium:
Politecnico di Milano (Italy, coordinator), Azienda Ospedaliera di Verona (Italy), Università di Siena(Italy), Imperial College (UK), Prosurgics Ltd. (UK), The Hebrew University of Jerusalem (Israel), Technion – Israel Institute of Technology (Israel), Mazor Surgical Technologies Ltd (Israel), Technische Universität München (Germany), Universität Karlsruhe (TH) (Germany), CF consulting S.r.l. (Italy)
Partners and Funding Bodies

Contact details
Prof. Ferdinando Rodriguez y Baena
Co-Director Hamlyn Centre, Professor in Medical Robotics
Prof. Brian Davies
Senior Research Investigator