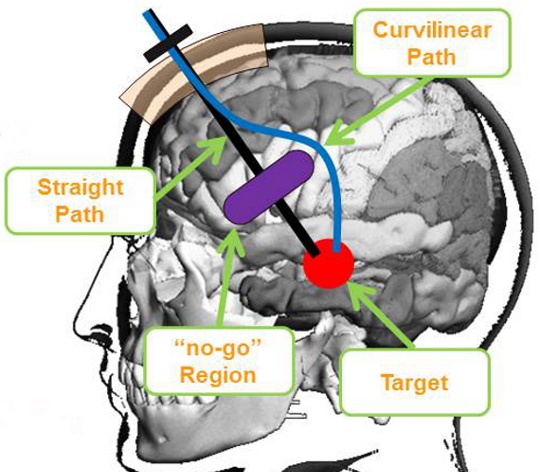
Minimally Invasive Surgery (MIS) for the diagnosis and treatment of a variety of medical pathologies has become the treatment of choice in many clinical applications. Among the MIS techniques available to the surgeon, percutaneous intervention has attracted significant interest because it is performed through a very small port through soft tissue, i.e skin. Generally, it is performed with straight needles because surgeons can extrapolate their behaviour in the tissue intuitively. Recently however, there has been an effort to introduce the use of flexible needles to reach a target while avoiding areas.
The research can be classified into three categories:
- Needle steering methods based on the lateral motion of an external base and deformation of the soft tissue
- Steering control of flexible needles with a bevel tip
- Steering control using concentric tubes.
Contrary to other approaches, we are currently developing a bio-inspired flexible probe codenamed STING (Soft Tissue Intervention and Neurosurgical Guide), which can change its direction smoothly by means of a ‘‘programmable bevel tip’’.
The probe takes its inspiration from the structure and functioning of the ovipositor (i.e. the egg-laying channel) of certain parasitic wasps. The ovipositor is composed of two or more segments (valves) which are connected by means of a special dovetail interlocking mechanism and can therefore slide with respect to each other. This very long, thin and flexible structure, provided with an inner channel used to deliver eggs, is used to penetrate different kinds of substrate (e.g. the bark of a tree).
Thanks to the multi-part structure of the ovipositor, several wasp species demonstrate steering capabilities, being able to reorient the ovipositor tip to reach a deep seated target.
The STING project consists of three primary research themes:
- Mechatronics and control
- Tool-tissue interaction modelling and optimisation
- Robotic Software and Medical Image Processing
Key Concepts
The Team
 From the left:
From the left:
Dr. Liu, Dr. Rodriguez y Baena, Dr. Secoli, Dr. Oldfield,
Mr. Burrows and Mr. Leibinger
Contact details
Prof. Ferdinando Rodriguez y Baena
Co-Director Hamlyn Centre, Professor in Medical Robotics
Prof. Brian Davies
Senior Research Investigator