We have been investigating and developing soft robotic manipulators since 2015. We specialise in soft robots actuated by pressurised fluids. We conduct research on design, analysis, modelling, control, sensing, and fabrication of soft robotic manipulators.
Design
We have been investigating the design of soft robotic manipulators that can be miniaturised for medical applications, and that can maximise force to be useful in practice. We proposed a common framework for the design of soft robots, see our paper.
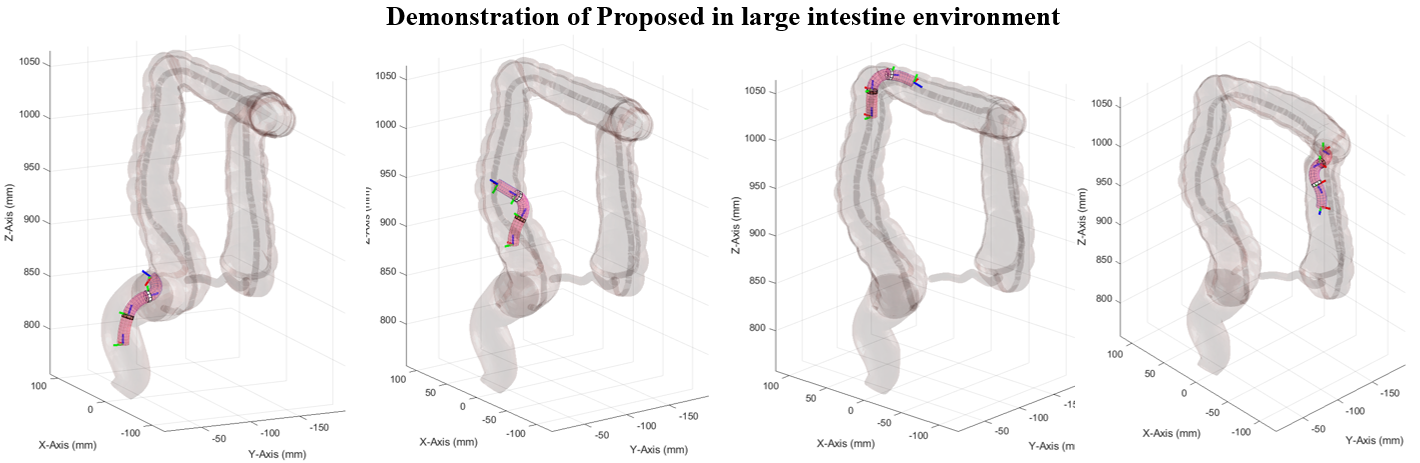
We used that framework as the foundation to create a soft robotic manipulator for endoluminal surgery, which we published. This is shown in the image below.

The robot has the following characteristics:
- 12 mm OD
- 6 DOF (the video demo only uses 4 DOFs)
- High dexterity (up to 180 degree bending per segment)
- Submillimetre precision
- Near 1N force at the distal end
- Low cost (can be disposable)
- Flexible supply tubes of any length (thanks to pneumatics)
- Biocompatible and MRI compatible
We have optimised the design of our soft robotic manipulator, and it offers the highest force of any soft robotic manipulator segment actuated by pressurised fluids in the world (for a given diameter), to the best of our knowledge. We show this in the paper that we published here.
We have patented the optimised design, which uses a morphing technology to maximise force. See our patent here.
We also made an affordable version of a robot segment with 2 DOFs for low and middle income countries, which we published here.
The robot is intended to be used for endoluminal surgery, as illustrated in the rendering below.
Control
We have been investigating the dynamic control of soft robotic manipulators. Our general approach consists in a model-based control paradigm constructed with energy shaping techniques which we published here
We have demonstrated experimentally that this yields a more consistent performance across different operating conditions compared to industry-standard controllers (see image below). We have employed nonlinear observers to estimate in real-time tool-tissue interactions common in minimally invasive surgery without employing force sensors (see our paper).
Finally, we have accounted for the dynamics of the pneumatic actuation, which had previously been neglected, thus allowing to replace sophisticated and expensive proportional valves with low-cost alternatives without compromising performance. We published this here.
.png)
We are currently investigating machine learning methods for kinematic mapping and control in Cartesian space.
Analysis and modelling
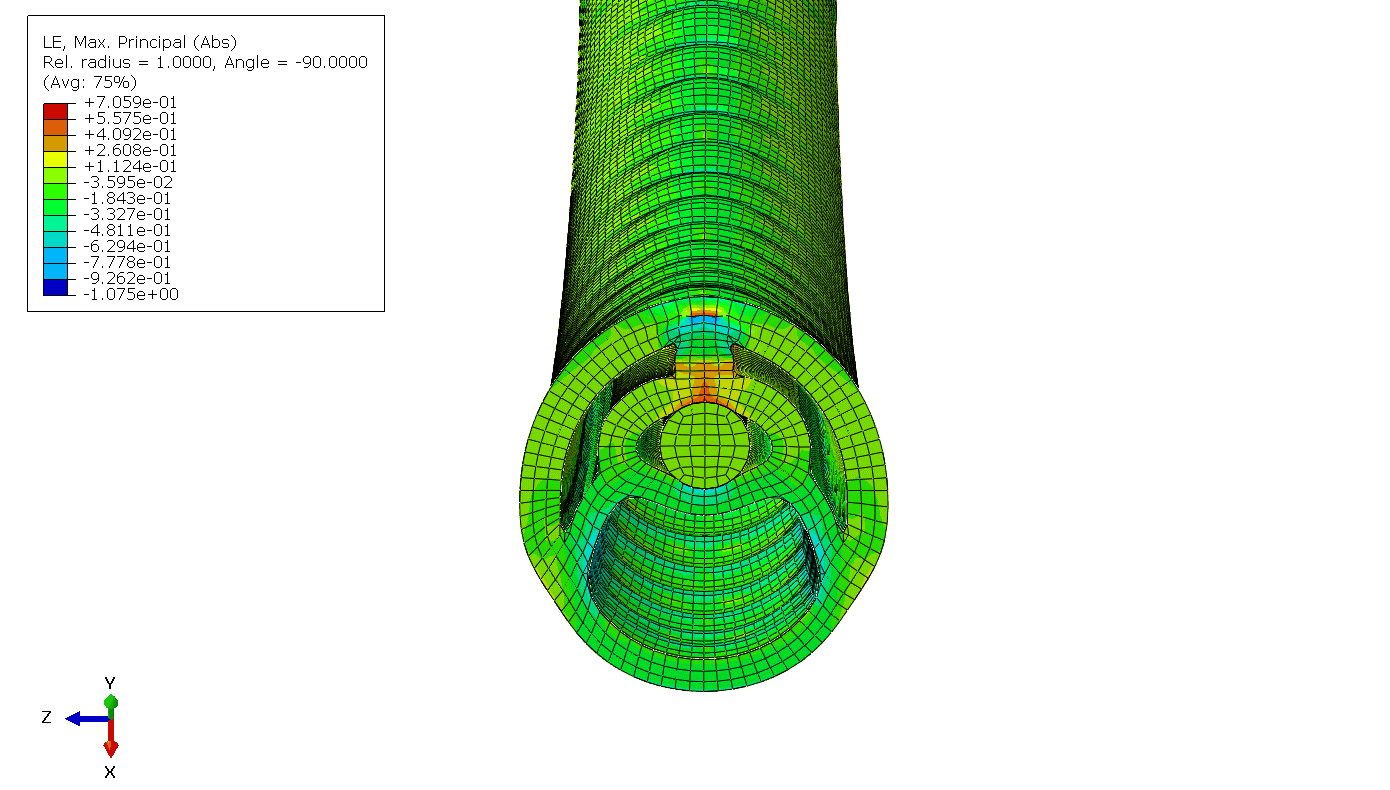
We proposed a framework to analyse the design of soft robotic manipulators, and we have also developed high fidelity finite element simulations of soft robots to then optimise the design, which are currently under review.
Fabrication
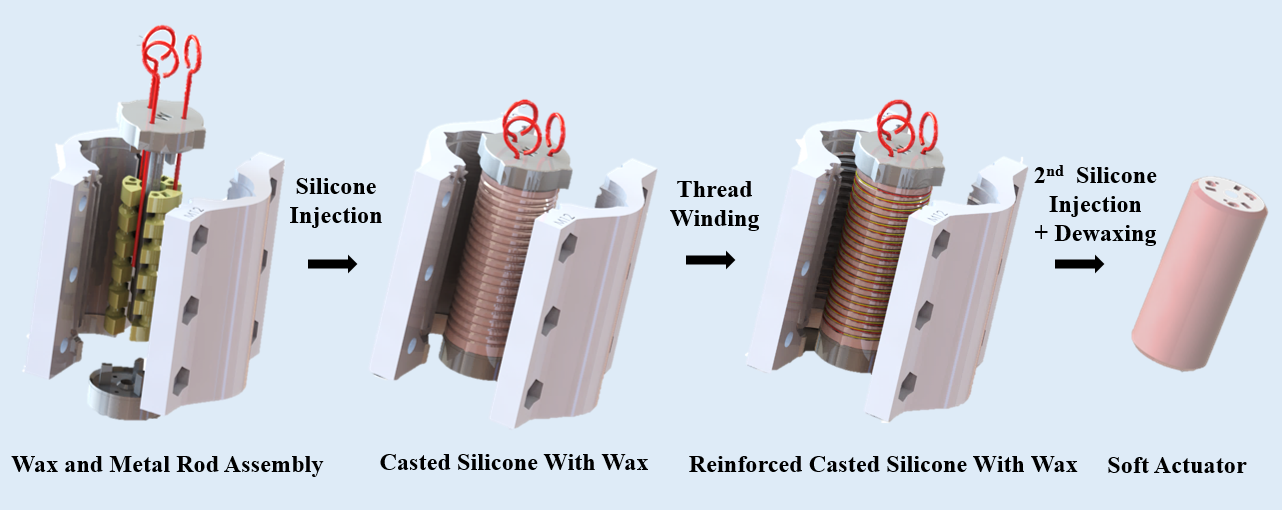
We have been exploring the fabrication of soft robots for a number of years. We explored casting using rigid metal moulds, plastic metal mouds of all sorts of plastic which can be assembled in parts, and we also explored lost wax casting. We found lost wax casting to be the best method, which is decribed in our recent paper.
The fabrication is conceptually illustrated below:
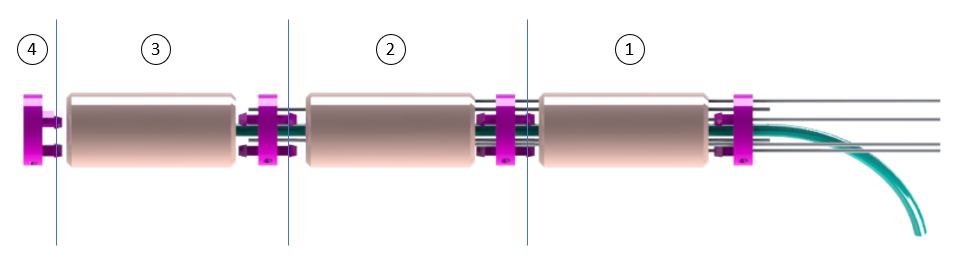
 The subsequent assembly of the robot is show below:
The subsequent assembly of the robot is show below:
We also have significant expertise in manufacturing miniature parts, and in primers and adhesives required to make soft robots. As a result, we are able to fabricate soft robots at a miniature scale, as reported e.g. here and here.
Sensing
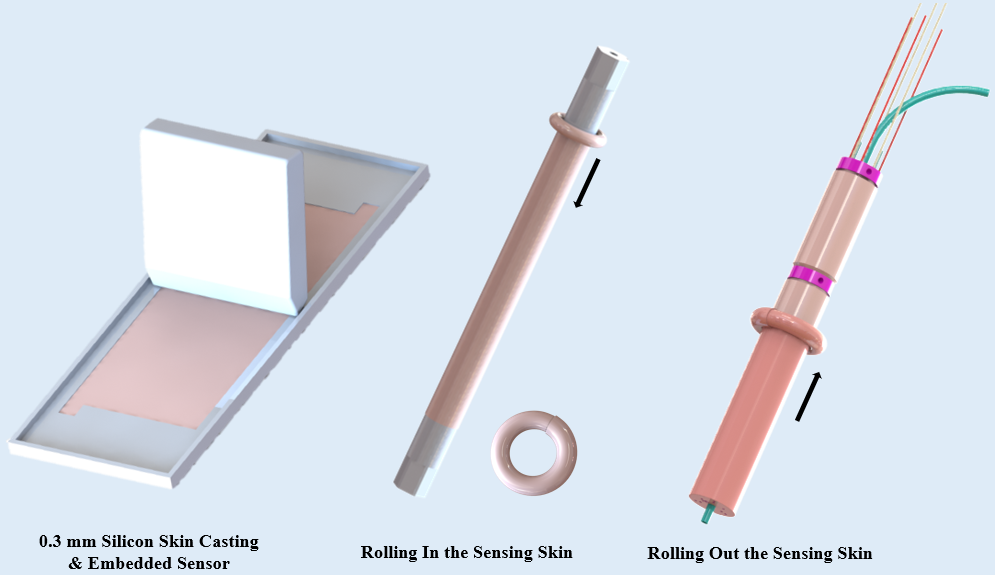
We have been exploring various sensing skins and fibre bragg gratings to estimate the defomration of soft robots.
A first version of our sensing skin was recently published. We are working on a new version now. The sensing skin assembly is illustrated below:
Our sensing using fibre bragg gratings was accepted for ICRA 2023, link to be published soon.
Contact details
Prof. Ferdinando Rodriguez y Baena
Co-Director Hamlyn Centre, Professor in Medical Robotics
Prof. Brian Davies
Senior Research Investigator