Fault diagnosis architectures are key components in the development of autonomous and intelligent systems that operate reliably in the presence of system faults, which are characterized by unpredictable changes in the system dynamics or various types of critical malfunction in the sensors and communication channels. The model based method has drawn growing attention owing to the adopted analytical redundancy, which has considerable advantage over physical redundancy normally used in knowledge based method. Residual generation is achieved by the state observer based on a fault-free model of the system, therefore estimation errors, sensitive to faults, can be compared to corresponding suitable thresholds for detecting the present of a fault.
The individual contribution to this problem was made in two aspects. One is the development of theoretical fault diagnosis architecture. Currently, such fault diagnosis methods are widely applied in monitoring changes of system dynamics. Moreover, the detectability and isolability of fault diagnosis architectures are implicitly analyzed, which leads to the impossibility of evaluating their practical capability prior to their deployment. A uni ed framework in sensor fault diagnosis architecture, including an explicit analysis on fault detectability, was developed with consideration given to both abrupt and incipient sensor faults. The analysis can characterize a set of detectable sensor faults without any real time data and reveal a relationship between the set and detection time as well. Another aspect is a benchmark simulation on sensor fault detection for an experimental continuous stirred tank heater (CSTH) pilot plant, which is one part of the project 'Increased Functionality Energy-autonomous Sensor Networks for Self-monitoring Industrial Environments' granted by ABB Research. Both centralized and distributed fault detection architectures shown in Figure 1 were tested in the benchmark in order to compare the performance of these detection architectures under speci c system conditions. An adaptive on-line approximator was utilized to learn the modeling uncertainty between the highly nonlinear system of CSTH and imprecise linearized model, which can avoid any further eff orts on system modeling.
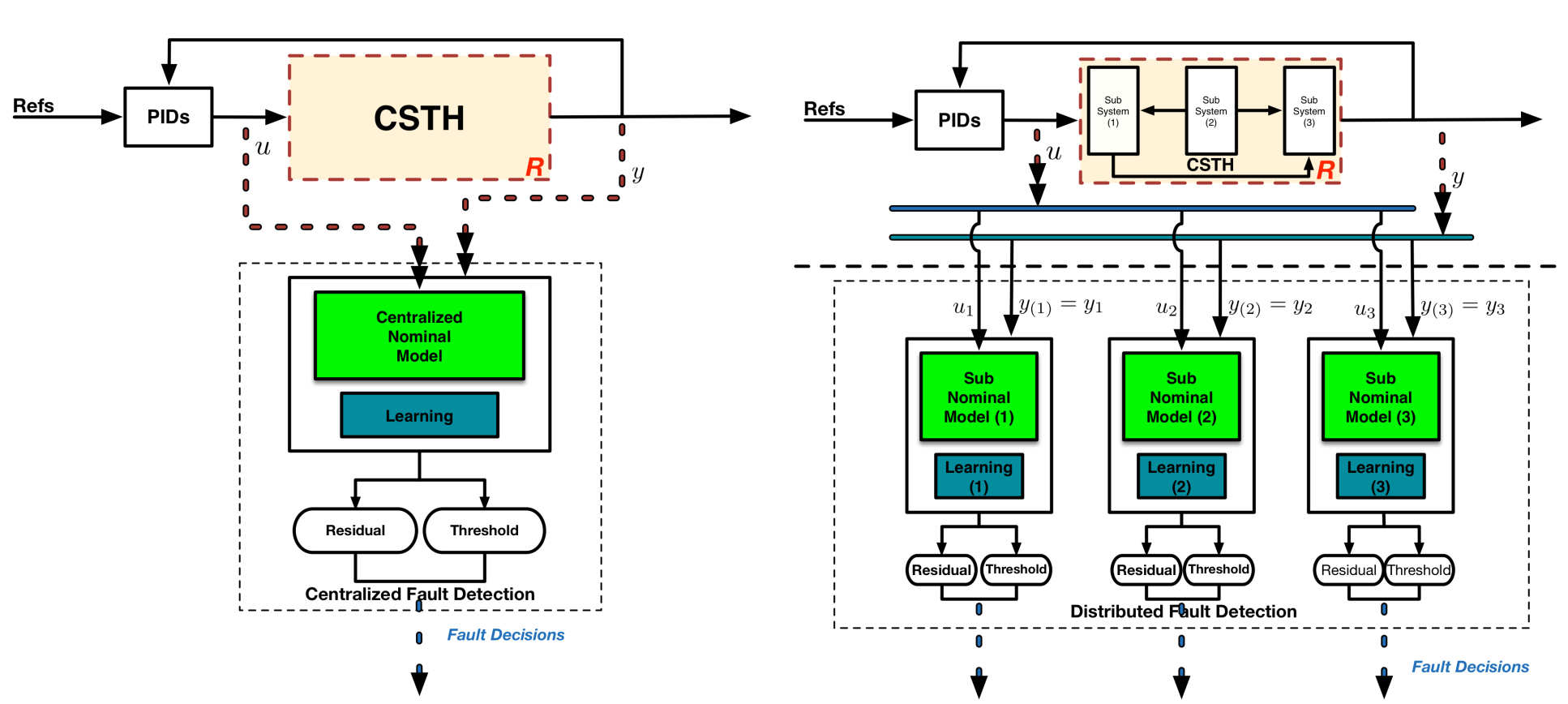
Figure 1: Centralized and Distributed fault detection approaches.
CAP People
- Prof. Thomas Parisini, t.parisini@imperial.ac.uk
- Mr. Yilun Zhou, yilun.zhou11@imperial.ac.uk